UN Weltverordnung automatisierte Fahrsysteme (ADS / FSD / VLA / Next-Gen AI), tiefe Unfallraten, Adaption EU-, Schweizer Recht.
19.03.2026
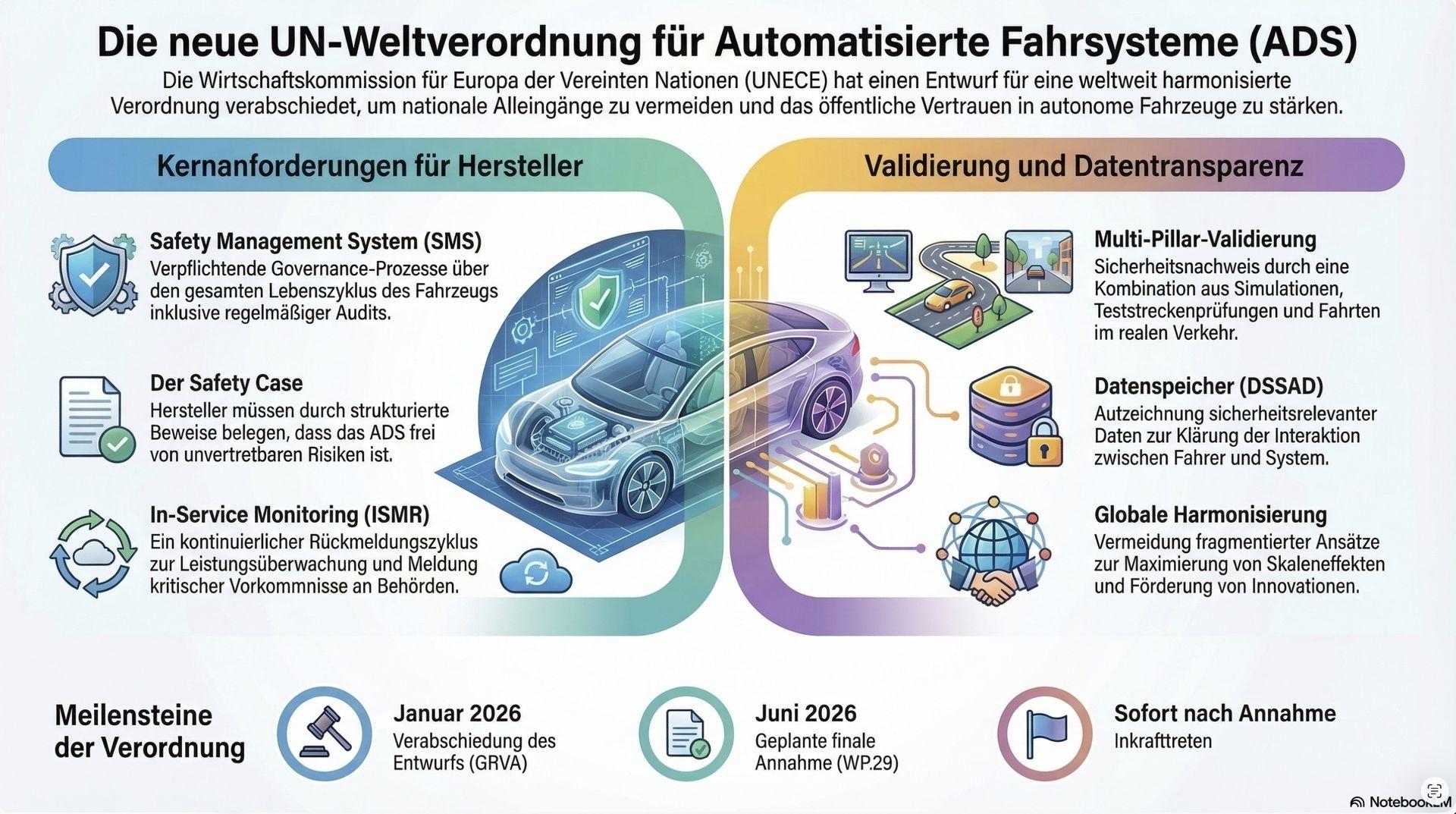
Die vereinten Nationen haben ein Regelwerk entwickelt und stehende vor der Einführung einer neuen UN-Weltverordnung für automatisierte Fahrsysteme (ADS) durch die Wirtschaftskommission für Europa der Vereinten Nationen (UNECE). Der Regelungsentwurf etabliert einen harmonisierten Sicherheitsrahmen, der auf einem sogenannten „Safety Case“ basiert und den Betrieb autonomer Fahrzeuge ohne menschliche Aufsicht auf öffentlichen Strassen ermöglichen soll. Zentrale Bestandteile sind ein verpflichtendes Sicherheitsmanagementsystem, strenge Prüfmethoden für die Glaubwürdigkeit virtueller Tests sowie Systeme zur Datenspeicherung und Leistungsüberwachung im laufenden Betrieb. Ziel dieser internationalen Zusammenarbeit ist es, eine fragmentierte nationale Gesetzgebung zu verhindern und durch einheitliche technische Standards das öffentliche Vertrauen in die Technologie zu stärken. Die endgültige Verabschiedung dieser globalen technischen Regelung ist für Juni 2026 vorgesehen. Zudem werden ergänzende Richtlinien für Notfall-Spurhaltesysteme und den Umgang mit fahrzeugspezifischen Daten erläutert.
Inhaltsverzeichnis.
1. Welches sind die Kernpunkte der neuen Weltverordnung für automatisierte Fahrsysteme (ADS)?
2. Was sind die wichtigsten Unterschiede zwischen menschlichen Fahrern und ADS?
3. Wie stellt das neue Regelwerk die Sicherheit autonomer Fahrzeuge sicher?
4. Das Konzept des Safety Management Systems.
5. Wie stellt das Safety-Management-System die Sicherheit über den Lebenszyklus sicher?
6. Wie wird das Sicherheitsniveau von ADS mit Menschen verglichen?
7. Was passiert bei einem Systemfehler oder Verlassen des Betriebsbereichs?
8. Wie hängen SMS und der Safety Case zusammen?
9. Was sind die Unterschiede zwischen Level 3, 4 und 5?
10. Was wird von der UN Verordnung in Schweizer Recht übernommen?
11. Welche Bedingungen gelten für das automatisierte Parkieren in der Schweiz?
12. Wie funktioniert die Haftung bei Unfällen mit Automatisierungssystemen?
13. Wie werden Operatorinnen für führerlose Fahrzeuge in der Schweiz geschult?
14. Kann ein Hersteller bei Softwarefehlern direkt haftbar gemacht werden?
15. Wie unterscheidet sich die Halterhaftung bei Level 3 und 4?
16. Welche Daten speichert das DSSAD-System bei einem Unfall genau?
17. Welches sind die Hersteller mit der aktuell besten Software?
18. Wie unterscheidet sich XPengs VLA 2.0 technisch von Teslas FSD?
19. Was macht Xiaomis Ansatz mit Physik-Modellen so besonders?
20. Vergleich der Rechenleistung von Tesla und XPeng.
21. Welche Rolle spielt Nvidia Cosmos bei der Entwicklung von Xiaomis Weltmodell?
22. Wie unterscheidet sich die FSD-Fahrweise (Tesla) von der eines menschlichen Fahrers?
23. Wie gut kommt das amerikanische System mit den Verkehrsregeln in Deutschland
zurecht?
24. Welche Vorteile bietet V2X (XPeng) für die Stauvermeidung in Städten?
25. Regulatorischen Hürden in der aktuelle Gesetzgebung für autonomes Fahren in der Europäischen Union (EU).
26. Wie hängen Tesla und der EU-Regulierungsplan für 2026 zusammen?
27. Welchen Sicherheitsnachweis fordert die UNECE für autonome Systeme ab 2026?
1. Welches sind die Kernpunkte der neuen Weltverordnung für automatisierte Fahrsysteme (ADS)?
Die neue Weltverordnung für automatisierte Fahrsysteme (ADS), formell als globale technische Regelung der Vereinten Nationen vorgeschlagen, etabliert weltweit harmonisierte Bestimmungen für die Sicherheit autonomer Fahrzeuge der Kategorien 1 und 2. Das Hauptziel besteht darin, die Verkehrssicherheit zu verbessern und Innovationen zu fördern, während gleichzeitig sichergestellt wird, dass ADS keine vorhersehbaren und vermeidbaren Unfälle mit Verletzten oder Toten verursachen.

Ganzheitliche Sicherheitsansätze.
Die Verordnung basiert auf einem strukturierten Rahmenwerk, das über den gesamten Lebenszyklus des Fahrzeugs gilt:
Sicherheitsmanagementsystem (SMS).
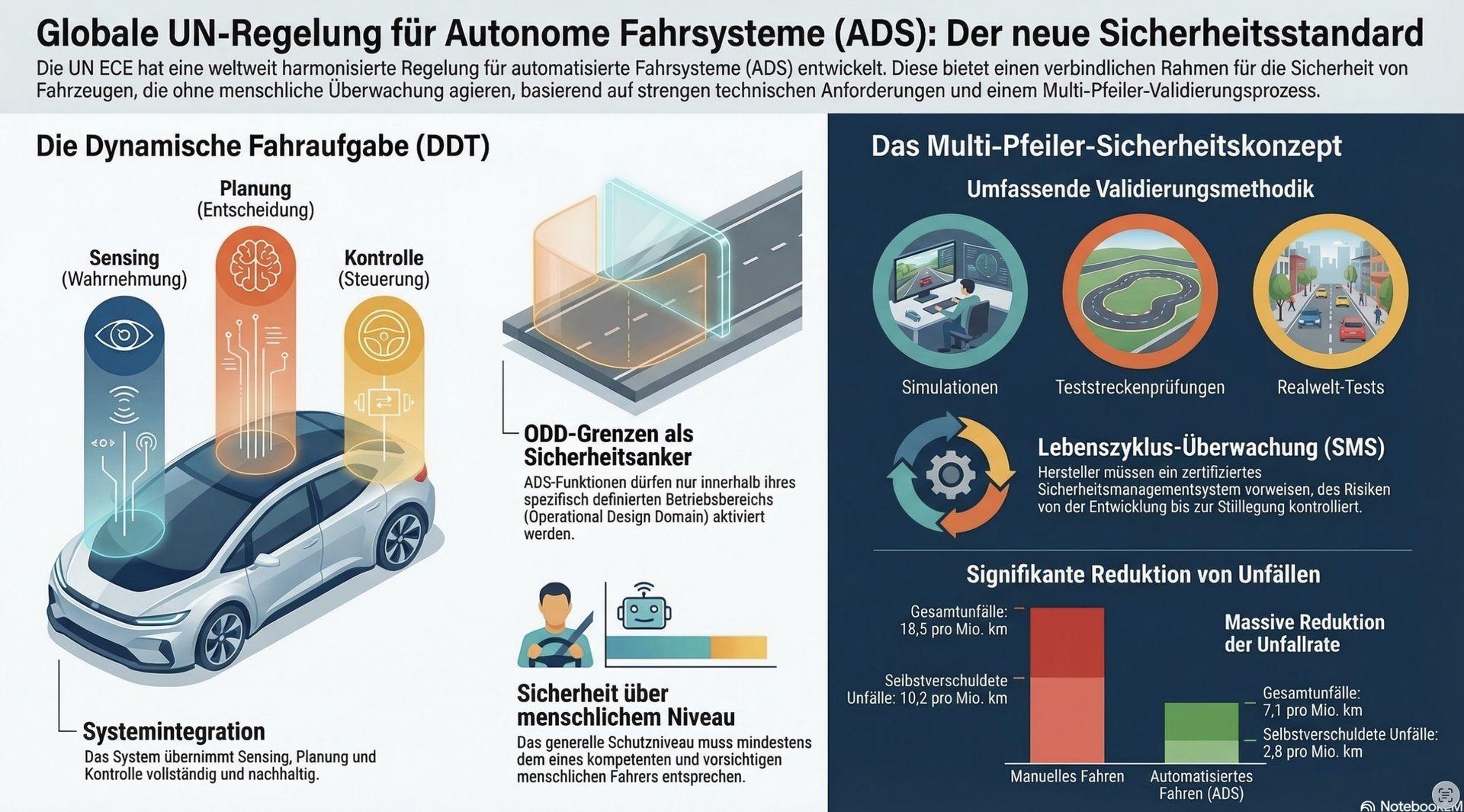
Hersteller müssen ein SMS implementieren, das organisatorische, personelle und technische Faktoren integriert, um Sicherheitsrisiken während der Entwicklung, Produktion und des Betriebs zu steuern. Dieses System unterliegt Audits und Zertifizierungen.
Safety Case (Sicherheitsnachweis).
Hersteller müssen eine strukturierte Dokumentation vorlegen, die durch Ansprüche, Argumente und Beweise (wie Testergebnisse und Analysen) belegt, dass das ADS frei von unangemessenen Risiken ist.
Glaubwürdigkeit der Tests.
Es werden Anforderungen gestellt, um die Genauigkeit und Verlässlichkeit der Testumgebungen sicherzustellen, insbesondere bei virtuellen Simulationen.
Multi-Pfeiler-Ansatz zur Validierung.
Die Sicherheit eines ADS kann nicht durch eine einzelne Methode allein validiert werden. Daher schreibt die Verordnung eine Kombination aus vier Säulen vor:
- Virtuelle Tests: Einsatz von Simulationen, um eine breite Palette von Szenarien abzudecken, die in der Realität schwer zu testen sind.
- Testgelände: Physische Tests auf geschlossenen Strecken zur Überprüfung spezifischer Funktionen.
- Realwelt-Tests: Erprobung im öffentlichen Strassenverkehr unter echten Verkehrsbedingungen.
- Audit und Bewertung: Prüfung der Dokumentation und der Simulationsprozesse des Herstellers durch Behörden.
Anforderungen an die Dynamische Fahraufgabe (DDT).
Das ADS muss in der Lage sein, die gesamte Fahraufgabe innerhalb seines definierten Betriebsbereichs (Operational Design Domain - ODD) sicher auszuführen.
- Sicherheitsniveau: Das System muss mindestens so sicher agieren wie ein kompetenter und vorsichtiger menschlicher Fahrer.
- Szenarien: Das System wird in nominalen (Normalbetrieb), kritischen (Gefahrenvermeidung) und Fehlerszenarien bewertet.
- Verkehrsregeln: Das ADS muss die geltenden Verkehrsregeln einhalten und darf den Verkehrsfluss nicht unangemessen behindern.
Interaktion zwischen Mensch und Maschine (HMI).
Die Verordnung enthält strikte Vorgaben für die Schnittstelle zum Nutzer:
- Sichere Übergaben: Es muss klare Verfahren für die Aktivierung und Deaktivierung geben, um „Modus-Konfusion“ zu vermeiden.
- Fahrerüberwachung: Bei Systemen, die eine Übernahme durch den Fahrer vorsehen, muss das System die Aufmerksamkeit und Bereitschaft des Nutzers überwachen.
- Nutzerinformation: Hersteller müssen Informationen über die Fähigkeiten und Grenzen des Systems bereitstellen.
Kontinuierliche Überwachung und Datenaufzeichnung.
- In-Service Monitoring and Reporting (ISMR): Ein Rückkoppelungsmechanismus verpflichtet Hersteller, die Sicherheitsleistung im realen Betrieb kontinuierlich zu überwachen und Berichte über kritische oder signifikante Vorkommnisse an die Behörden zu senden.
- Data Storage System for Automated Driving (DSSAD): Das Fahrzeug muss mit einem Datenspeichersystem ausgestattet sein, das sicherheitsrelevante Leistungsdaten aufzeichnet, um Unfallursachen klären und den Systemstatus bestimmen zu können.
Technologische Neutralität und Zukunftssicherheit.
Die Bestimmungen sind leistungsorientiert und technologieneutral formuliert. Dies bedeutet, dass sie den aktuellen Stand der Technik widerspiegeln, ohne künftige Innovationen durch zu spezifische technische Vorgaben einzuschränken. Die Verordnung ist zudem so konzipiert, dass sie an verschiedene nationale Zertifizierungsprozesse angepasst werden kann.
Rahmenwerk der WP.29.
Das übergeordnete organisatorische Rahmenwerk der WP.29 und den spezifischen Zeitplan für die neue globale ADS-Verordnung (Automated Driving Systems).
Chronologie der UN-Regulierungsmeilensteine.
Jahr / Termin |
Bezeichnung / Ziffer |
Bedeutung und Inhalt |
|
Seit 1952 |
WP.29 |
Gründung des Weltforums für die Harmonisierung von Autovorschriften (World Forum for Harmonization of Vehicle Regulations) unter der UNECE. |
|
2022 |
Rahmendokument |
Dokument zu autonomen Fahrzeugen, das die wichtigsten Grundsätze für die ADS-Entwicklung festlegt. |
|
Juni 2024 |
ADS-Leitlinien |
Verabschiedung von Empfehlungen für Anforderungen an automatisch Fahrsysteme sowie Bewertungs- und Testmethoden. |
|
Jan. 2026 |
ADS-Verordnungsentwurf |
Annahme des Entwurfs für eine globale Verordnung durch die Arbeitsgruppe GRVA (Arbeitsgruppe für automatisierte und vernetzte Fahrzeuge). |
|
Juni 2026 |
ADS-Global-Regelung |
Geplanter Termin für die endgültige Verabschiedung der globalen Verordnung durch die WP.29. Tritt bei Annahme sofort in Kraft. |
Wichtige Ziffern innerhalb des aktuellen ADS-Verordnungsentwurfs.
Die Quellen nennen zudem spezifische Abschnitte des 89-seitigen Entwurfs, die für die Zulassung entscheidend sind:
- Abschnitt 2, Absatz 3.3: Legt fest, dass das Sicherheitsniveau eines ADS mindestens so gut oder besser sein muss als das eines kompetenten, vorsichtigen menschlichen Fahrers.
- Abschnitt 4, Absatz 4: Regelt technische Prinzipien, wie das Verbot von „Online In-vehicle learning AI“. Die KI darf im Betrieb nicht eigenständig neue Fahrweisen lernen, die nicht zuvor in einer Engineering-Umgebung validiert wurden.
Bedeutung der WP.29 und GRVA
Die WP.29 ist die zentrale Standardisierungsbehörde der UN für Autovorschriften. Ihr untergeordnet ist die GRVA (Arbeitsgruppe für automatisierte und vernetzte Fahrzeuge), die den aktuellen Vorschlag für autonomes Fahren der Stufe 4 ohne menschliche Aufsicht erarbeitet hat. Ziel dieser Regulierung ist es, das aktuelle „Stückwerk“ nationaler Gesetze durch ein einheitliches, globales Regelwerk für über 60 Länder zu ersetzen.
© stromzeit.ch*
2. Was sind die wichtigsten Unterschiede zwischen menschlichen Fahrern und ADS?
Basierend auf den vorliegenden Dokumenten ergeben sich die wichtigsten Unterschiede zwischen menschlichen Fahrern und automatisierten Fahrsystemen (ADS) vor allem in den Bereichen Sicherheitsleistung, Fahreffizienz, Aufgabentrennung und der Abhängigkeit von definierten Betriebsbereichen.
Sicherheitsleistung und Unfallraten.
- Höheres Sicherheitsniveau: Als allgemeines Konzept wird festgelegt, dass das Sicherheitsniveau eines ADS mindestens so hoch oder höher sein muss als das eines kompetenten und vorsichtigen menschlichen Fahrers.
- Statistischer Vergleich: Empirische Daten zeigen, dass die Unfallraten im ADS-Modus konsistent niedriger sind als beim manuellen Fahren. Während bei menschlichen Fahrern durchschnittlich 18,5 Unfälle pro Million Kilometer verzeichnet werden, liegt dieser Wert bei ADS-gesteuerten Fahrzeugen bei 7,1 Unfällen.
- Fehlervermeidung: Systeme wie das Notfall-Spurhaltesystem (ELKS) wurden speziell entwickelt, um menschliche Fehler wie unbeabsichtigtes Abweichen von der Fahrspur (z. B. durch Monotonie oder Unaufmerksamkeit) zu korrigieren.
Fahreffizienz und Verhalten.
- Konservativer Fahrstil: ADS neigen dazu, langsamer und vorsichtiger zu agieren als Menschen. Studien deuten darauf hin, dass automatisierte Fahrzeuge eine um 5 bis 15 Prozent geringere Durchschnittsgeschwindigkeit aufweisen können.
- Ursachen für Verzögerungen: Diese geringere Effizienz resultiert aus konservativen Entscheidungen beim Folgeabstand, einer suboptimalen Routenplanung und verzögerten Reaktionen auf dynamische Umgebungen, insbesondere während der Stosszeiten.
Aufgabenteilung: Strategisch vs. Operativ.
- Definition der Fahraufgabe (DDT): Das ADS übernimmt die gesamte dynamische Fahraufgabe (DDT), was alle taktischen (z. B. Manöverplanung, Interaktion mit anderen) und operativen Funktionen (z. B. Lenken, Beschleunigen) umfasst.
- Menschliche Domäne: Die strategischen Funktionen der Fahrt – wie das Festlegen des Ziels oder der Route – verbleiben beim Menschen und sind nicht Teil der Aufgaben des ADS.
- Interaktion: Da Menschen bei Systemen der Stufe 3 noch als Rückfallebene dienen, muss das ADS über eine Schnittstelle (HMI) verfügen, um die Aufmerksamkeit und Bereitschaft des Nutzers kontinuierlich zu überwachen, falls eine Übernahme notwendig wird.
Betriebsbereich (ODD) und Regelinterpretation.
- Eingeschränkte Domäne: Ein ADS ist im Gegensatz zum Menschen auf einen spezifischen Betriebsbereich (Operational Design Domain - ODD) ausgelegt, der durch Faktoren wie Strassentyp, geografisches Gebiet und Umweltbedingungen definiert ist.
- Regelbasierte Steuerung: Während menschliches Fahrverhalten oft auf impliziten Annahmen und kulturellen Fahrstilen basiert, erfordert ein ADS die Kodifizierung von Verkehrsregeln, um klare, mathematisch fassbare Entscheidungsgrundlagen für verschiedene Szenarien zu haben.
Umgang mit Unvorhersehbarem.
- Reaktion auf Fehler: ADS müssen in der Lage sein, interne Systemfehler oder das Verlassen des zulässigen Betriebsbereichs selbstständig zu erkennen und daraufhin einen minimalen Risikozustand (MRC) einzunehmen, um die Sicherheit zu gewährleisten.
- Voraussehbarkeit: Während Menschen oft intuitiv auf das Fehlverhalten anderer reagieren, muss ein ADS durch strukturierte Sicherheitsszenarien (nominal, kritisch und Fehlerszenarien) validiert werden, um sicherzustellen, dass es vorhersehbare und vermeidbare Unfälle ausschliesst.
3. Wie stellt das neue Regelwerk die Sicherheit autonomer Fahrzeuge sicher?
Das neue Regelwerk gewährleistet die Sicherheit autonomer Fahrzeuge (ADS) durch einen ganzheitlichen, strukturierten Rahmen, der den gesamten Lebenszyklus des Systems abdeckt – von der Entwicklung über die Produktion bis hin zum Betrieb auf der Strasse. Anstatt sich auf starre technische Spezifikationen zu verlassen, setzt die Verordnung auf einen leistungsbasierten und technologieneutralen Ansatz, der sicherstellen soll, dass ADS keine vorhersehbaren und vermeidbaren Unfälle verursachen.
© stromzeit.ch*
Organisatorische Sicherheit: Das Sicherheitsmanagementsystem (SMS).
Hersteller sind verpflichtet, ein Sicherheitsmanagementsystem (SMS) zu implementieren, das sicherstellt, dass Sicherheitsaspekte in der gesamten Unternehmenskultur und den Prozessen verankert sind.
- Risikomanagement: Das SMS muss Prozesse enthalten, um organisatorische, personelle und technische Risiken systematisch zu identifizieren und zu minimieren.
- Auditierung: Die Robustheit dieser Prozesse wird von Behörden durch Audits überprüft und zertifiziert.
Nachweispflicht: Der „Safety Case“ (Sicherheitsnachweis).
Der Hersteller muss einen sogenannten Safety Case erstellen – eine strukturierte Dokumentation, die auf Ansprüchen, Argumenten und Beweisen basiert:
- Beweisführung: Er muss nachweisen, dass das ADS frei von unangemessenen Risiken für Nutzer und andere Verkehrsteilnehmer ist.
- Sicherheitskonzept: Darin enthalten ist ein detailliertes Sicherheitskonzept, das beschreibt, wie das System Gefahren erkennt und darauf reagiert.
Der Multi-Pfeiler-Ansatz zur Validierung.
Die Sicherheit eines ADS kann nicht durch eine einzige Testmethode belegt werden. Daher schreibt das Regelwerk eine Kombination aus vier Validierungsmethoden vor:
- Virtuelle Tests: Einsatz von Simulationen, um eine enorme Anzahl von Szenarien, einschliesslich seltener „Edge Cases“, effizient zu prüfen. Hierbei muss die Glaubwürdigkeit der Simulationswerkzeuge (Credibility Assessment) explizit nachgewiesen werden.
- Testgelände: Physische Prüfungen auf geschlossenen Strecken zur Verifizierung spezifischer Sicherheitsfunktionen.
- Realwelt-Tests: Erprobung im öffentlichen Strassenverkehr, um die Leistung unter echten Verkehrsbedingungen zu bewerten.
- Audit und Bewertung: Eine unabhängige Prüfung der Herstellervorgaben und Testprozesse durch Behörden.
Anforderungen an die Fahraufgabe (DDT) und den Betriebsbereich (ODD).
Das ADS muss die gesamte dynamische Fahraufgabe (DDT) sicher bewältigen können.
- Sicherheitsniveau: Das System muss mindestens so sicher agieren wie ein kompetenter und vorsichtiger menschlicher Fahrer.
- ODD-Grenzen: Ein ADS darf nur innerhalb seines definierten Betriebsbereichs (Operational Design Domain) aktiviert werden können und muss in der Lage sein, ein Verlassen dieser Grenzen zu erkennen und darauf sicher zu reagieren.
- Minimaler Risikozustand (MRC): Bei Systemfehlern oder ODD-Austritten muss das Fahrzeug automatisch in einen stabilen, sicheren Zustand (z. B. Stillstand am Strassenrand) übergehen.
Mensch-Maschine-Interaktion (HMI).
Um Unfälle durch Fehlbedienung zu vermeiden, stellt das Regelwerk strikte Anforderungen an die Schnittstelle zwischen Mensch und ADS.
- Vermeidung von Modus-Konfusion: Es muss jederzeit klar sein, wer die Kontrolle über das Fahrzeug hat (Mensch oder System).
- Fahrerüberwachung: Bei Systemen, die eine Übernahme durch den Fahrer vorsehen (Level 3), muss das ADS die Aufmerksamkeit und Bereitschaft des Nutzers kontinuierlich überwachen.
Kontinuierliche Überwachung nach Markteinführung (ISMR).
Die Sicherheit endet nicht mit der Zulassung. Durch das In-Service Monitoring and Reporting (ISMR) müssen Hersteller die Sicherheitsleistung im realen Betrieb kontinuierlich überwachen.
- Meldepflicht: Kritische oder sicherheitsrelevante Vorkommnisse müssen den Behörden gemeldet werden.
- Lerneffekt: Diese Daten dienen dazu, neue Szenarien zu identifizieren und die Regularien stetig zu verbessern.
- Datenspeicherung (DSSAD): Ein verpflichtendes Datenspeichersystem zeichnet sicherheitsrelevante Parameter auf, um nach einem Vorfall klären zu können, ob das ADS oder der Mensch die Fahraufgabe ausgeführt hat.
4. Das Konzept des Safety Management Systems.
Ein Safety Management System (SMS) ist im Grunde ein umfassendes „Sicherheits-Regelwerk“ und eine fest verankerte Unternehmenskultur, die ein Hersteller einführen muss, um die Sicherheit seiner automatisierten Fahrsysteme (ADS) über deren gesamten Lebenszyklus hinweg zu garantieren.
Die drei Grundpfeiler des SMS.
- Der Mensch (Human): Es wird sichergestellt, dass nur Experten mit den richtigen Fähigkeiten und Schulungen an dem System arbeiten. Sie müssen in der Lage sein, Risiken zu erkennen und Fehlerquellen (auch menschliche Fehler) zu minimieren.
- Die Organisation (Organisational): Das Unternehmen muss klare interne Regeln und Abläufe haben. Dazu gehören festgeschriebene Sicherheitsrichtlinien, Verantwortlichkeiten und Methoden, um Gefahren systematisch zu managen, bevor sie entstehen.
- Die Technik (Technical): Es müssen die richtigen Werkzeuge und hochwertiges Equipment verwendet werden, um die Sicherheit des Systems technisch sicherzustellen und zu prüfen.
Was macht das SMS im Alltag?
Ein SMS ist kein einmaliges Dokument, sondern ein lebendiger Prozess, der folgende Aufgaben erfüllt:
- Risikomanagement: Gefahren werden nicht nur zufällig gefunden, sondern durch strukturierte Prozesse (wie Risikoanalysen) aktiv gesucht und beseitigt.
- Sicherheitsgarantie (Safety Assurance): Durch regelmässige Prüfungen (Audits) kontrolliert das Unternehmen selbst und lassen externe Behörden kontrollieren, ob alle Sicherheitsversprechen auch wirklich eingehalten werden.
- Kontinuierliche Verbesserung: Das System lernt ständig dazu. Wenn das Auto bereits auf der Strasse ist, werden Daten gesammelt (In-Service Monitoring), um aus Fehlern oder neuen Verkehrssituationen zu lernen und das System per Software-Update sicherer zu machen.
Sicherheit von Anfang bis Ende.
Das SMS begleitet das automatisierte Fahrzeug durch alle Phasen seines „Lebens“:
- Entwicklung: Sicherheit wird schon beim ersten Entwurf mitgeplant.
- Produktion: Jedes Fahrzeug muss exakt so sicher gebaut werden, wie es geplant war.
- Betrieb: Auch wenn das Auto schon beim Kunden ist, bleibt der Hersteller für die Überwachung der Sicherheit verantwortlich.
- Ausserbetriebnahme: Selbst wenn das System veraltet ist, muss das SMS regeln, wie es sicher abgeschaltet oder ersetzt wird.
Warum ist das wichtig?
Ohne ein funktionierendes SMS darf ein Hersteller seine autonomen Fahrzeuge nicht auf den Markt bringen. Behörden führen Audits durch, um sicherzustellen, dass diese Prozesse robust sind und der Hersteller wirklich in der Lage ist, die Sicherheit über Jahre hinweg zu managen.
Das SMS ist das organisatorische Rückgrat, das dafür sorgt, dass Sicherheit bei einem Autohersteller kein Zufallsprodukt ist, sondern das Ergebnis einer präzisen Planung und ständigen Kontrolle.
5. Wie stellt das Safety-Management-System die Sicherheit über den Lebenszyklus sicher?
Das Safety Management System (SMS) stellt die Sicherheit eines automatisierten Fahrsystems (ADS) sicher, indem es als systematischer Ansatz menschliche, organisatorische und technische Faktoren über den gesamten Lebenszyklus des Fahrzeugs hinweg integriert. Dieser Lebenszyklus umfasst die Phasen Entwicklung, Produktion, Betrieb und Ausserbetriebnahme.
Design und Entwicklung.
In dieser frühen Phase legt das SMS das Fundament für ein sicheres System:
- Risikomanagement: Hersteller müssen Prozesse zur Identifizierung, Analyse und Minderung von Risiken implementieren.
- Kompetenzmanagement: Es wird sichergestellt, dass nur qualifiziertes Personal mit den entsprechenden Fähigkeiten und Schulungen Entscheidungen trifft, die die Sicherheit beeinflussen.
- Sicherheitskonzept: Das SMS erzwingt die Anwendung von Methoden wie der funktionalen Sicherheit (ISO 26262) und SOTIF (Sicherheit der beabsichtigten Funktionalität), um Hardware- und Softwarefehler sowie funktionale Unzulänglichkeiten zu minimieren.
- Validierung: Es wird sichergestellt, dass die Testumgebungen (virtuell, Testgelände und Realwelt) für die Erbringung von Sicherheitsnachweisen geeignet sind.
Produktion und Lieferkette.
Das SMS gewährleistet, dass jedes gebaute Fahrzeug exakt den Sicherheitsvorgaben des geprüften Designs entspricht:
- Qualitätsmanagement: Die Anwendung von Standards wie IATF 16949 stellt die Robustheit der Produktion sicher.
- Lieferketten-Kontrolle: Hersteller müssen vertragliche Regelungen und Schnittstellen zu Zulieferern etablieren, um sicherzustellen, dass auch eingekaufte Komponenten die Sicherheitsanforderungen des SMS erfüllen.
Betrieb (In-Service Phase).
Sicherheit endet nicht mit dem Verkauf des Fahrzeugs. Das SMS beinhaltet das In-Service Monitoring and Reporting (ISMR):
- Kontinuierliche Überwachung: Der Hersteller muss die Sicherheitsleistung seiner ADS-Flotte im realen Betrieb aktiv überwachen und Daten sammeln, um unvorhergesehene Sicherheitsrisiken zu identifizieren.
- Ereignisuntersuchung: Kritische Vorfälle müssen untersucht werden, um die Wirksamkeit von Sicherheitskontrollen zu prüfen und gegebenenfalls Korrekturmassnahmen (z. B. Software-Updates) einzuleiten.
- Meldepflicht: Das SMS regelt die Berichterstattung an Behörden über signifikante und kritische Vorkommnisse.
Ausserbetriebnahme.
Sogar am Ende der Nutzungsdauer greift das SMS:
- Deaktivierungsstrategie: Es muss eine Strategie geben, die verhindert, dass ADS-Funktionen reaktiviert werden, nachdem ein Fahrzeug offiziell außer Dienst gestellt oder verschrottet wurde.
- Erfolgsmessung: Das System nutzt Key Performance Indicators (KPIs), um die Effektivität des Sicherheitsmanagements bis zum Ende der Betriebsphase zu bewerten.
Übergreifende Mechanismen zur Absicherung.
Um sicherzustellen, dass diese Prozesse nicht nur auf dem Papier existieren, schreibt die Verordnung vor:
- Sicherheitskultur: Das SMS muss eine Unternehmenskultur fördern, in der Sicherheit oberste Priorität hat und Verantwortlichkeiten klar zugewiesen sind.
- Unabhängige Audits: Die Robustheit des SMS wird durch regelmässige interne und externe Audits von Behörden überprüft und zertifiziert.
- Kontinuierliche Verbesserung: Das SMS unterliegt einem ständigen Lernprozess (Plan-Do-Check-Act), um auf technologische Entwicklungen und neue Erkenntnisse aus dem Feld zu reagieren.
6. Wie wird das Sicherheitsniveau von ADS mit Menschen verglichen?
Der Vergleich zwischen dem Sicherheitsniveau von automatisierten Fahrsystemen (ADS) und menschlichen Fahrern erfolgt im neuen Regelwerk sowohl über grundsätzliche Leistungsanforderungen als auch über statistische Benchmarks.

Der allgemeine Sicherheitsmassstab.
Als grundlegendes Konzept legt die Verordnung fest, dass das Sicherheitsniveau eines ADS mindestens so hoch oder höher sein muss als das eines kompetenten und vorsichtigen menschlichen Fahrers. Das Ziel ist es, sicherzustellen, dass das System keine im Rahmen seines Betriebsbereichs (ODD) vorhersehbaren und vermeidbaren Unfälle verursacht, die zu Verletzungen oder zum Tod führen.
Statistischer Vergleich der Unfallraten.
Empirische Daten aus Demonstrationszonen und von Forschungseinrichtungen weltweit erlauben einen direkten Vergleich der Unfallhäufigkeit:
Menschliche Fahrer: Verzeichnen im Durchschnitt 18,5 Unfälle pro Million Kilometer (davon 10,2 selbstverschuldete Unfälle).
Automatisierte Systeme: Weisen im ADS-Modus konstant niedrigere Raten von 7,1 Unfällen pro Million Kilometer auf (davon lediglich 2,8 selbstverschuldete Unfälle).
Einige führende Technologieanbieter haben im automatisierten Modus sogar null selbstverschuldete Unfälle pro Million Kilometer erreicht.
Unterschiede im Fahrverhalten und der Effizienz.
Trotz der höheren Sicherheit zeigt der Vergleich, dass ADS oft defensiver agieren als Menschen:
- Geschwindigkeit: Studien deuten darauf hin, dass ADS eine um 5 bis 15 Prozent geringere Durchschnittsgeschwindigkeit als menschliche Fahrer aufweisen.
- Konservativer Fahrstil: Dies liegt an vorsichtigeren Entscheidungen beim Folgeabstand, einer suboptimalen Routenplanung und verzögerten Reaktionen auf dynamische Umgebungen, was besonders während der Stosszeiten zu Effizienzeinbussen führen kann.
Methodik des Vergleichs im Zulassungsprozess.
Im Rahmen des sogenannten Safety Case (Sicherheitsnachweis) müssen Hersteller spezifische Analysen vorlegen:
- Direkter Vergleich: Der Hersteller muss Analysen durchführen, die die Leistung einer ADS-Funktion mit der eines manuell gesteuerten Fahrzeugs einer vergleichbaren Kategorie in Situationen innerhalb der ODD vergleichen.
- Modellierung: In kritischen Szenarien, in denen die Definition von Leistungskriterien schwierig ist, können Sicherheitsmodelle herangezogen werden, um die Leistung des ADS innerhalb der Grenzen dieser Modelle zu bewerten.
- Validierung: Der Multi-Pfeiler-Ansatz (virtuelle Tests, Testgelände, Realwelt-Tests) dient dazu, nachzuweisen, dass das ADS die verlangten Verhaltenskompetenzen tatsächlich besser oder gleichwertig zum Menschen beherrscht.
Datengestützte Überwachung (DSSAD).
Um diesen Vergleich auch nach der Markteinführung kontinuierlich führen zu können, ist ein Datenspeichersystem für automatisiertes Fahren (DSSAD) vorgeschrieben. Dieses zeichnet auf, ob das System oder der Mensch die Kontrolle hatte, und ermöglicht es den Behörden, bei Vorfällen genau zu analysieren, ob das ADS die Fahraufgabe sicherer bewältigt hat, als es von einem Menschen zu erwarten gewesen wäre.
7. Was passiert bei einem Systemfehler oder Verlassen des Betriebsbereichs?
Bei einem Systemfehler oder dem Verlassen des definierten Betriebsbereichs (Operational Design Domain – ODD) greifen im neuen Regelwerk spezifische Sicherheitsmechanismen, die sicherstellen, dass das Fahrzeug jederzeit in einem sicheren Zustand bleibt. Das System muss solche Situationen selbstständig erkennen und eine entsprechende Fallback-Reaktion einleiten.
Erkennung und Reaktion auf Systemfehler.
Das ADS ist darauf ausgelegt, Fehler, Fehlfunktionen oder Anomalien zu erkennen, welche die Ausführung der Fahraufgabe (DDT) beeinträchtigen. Je nach Schwere des Fehlers muss das System wie folgt reagieren:
- Ausführung einer Fallback-Reaktion: Wenn der Fehler die sichere Fahrt verhindert, muss das System eine Fallback-Prozedur einleiten und die Aktivierung der betroffenen Funktionen blockieren.
- Anpassung der Leistung: Bei weniger kritischen Fehlern kann das ADS seine Leistung an die Schwere des Fehlers anpassen, solange die allgemeinen Sicherheitsanforderungen weiterhin erfüllt werden.
- Fernabschaltung: Das ADS muss in der Lage sein, per Fernsteuerung (Remote Termination) deaktiviert zu werden, was ebenfalls eine Fallback-Reaktion auslösen kann.
Verhalten beim Verlassen des Betriebsbereichs (ODD Exit).
Das ADS muss die Grenzen seines ODD (z. B. Wetterbedingungen, Strassentyp oder geografisches Gebiet) kontinuierlich überwachen:
- Erkennung des Austritts: Wenn Bedingungen auftreten, die ausserhalb der ODD-Limits liegen, oder erforderliche Bedingungen fehlen, erkennt das System einen „ODD Exit“.
- Fallback-Reaktion: Das System muss sofort eine Fallback-Reaktion einleiten.
- Sicheres Anhalten (ADSF-2): Bei Systemen des Typs 2 (ohne Fallback-Nutzer) ist das Ziel, das Fahrzeug an einem sicheren Ort (z. B. einem Parkplatz) in Übereinstimmung mit den Verkehrsregeln zum Stillstand zu bringen.
- Vorausschauendes Handeln: Das ADS soll in der Lage sein, vorhersehbare ODD-Exits zu antizipieren und sicher darauf zu reagieren.
Der minimale Risikozustand (MRC).
Sollte eine Übergabe an einen menschlichen Fahrer (bei Level-3-Systemen) nicht möglich sein oder handelt es sich um ein vollautonomes System, führt die Fallback-Reaktion in den minimalen Risikozustand (MRC):
- Definition: Ein MRC ist ein stabiler und angehaltener Zustand des Fahrzeugs, der das Risiko einer Kollision minimiert.
- Signalisierung: Das ADS muss dem Nutzer den Beginn des Übergangs in den MRC signalisieren.
- Manuelle Übernahme: Nach Erreichen des MRC kann es dem Nutzer unter Umständen erlaubt werden, die Kontrolle über das Fahrzeug zu übernehmen.
Datenaufzeichnung und Meldepflicht.
Jeder Systemfehler sowie das Verlassen des ODD werden im Datenspeichersystem (DSSAD) aufgezeichnet. Zudem sind Hersteller verpflichtet, „signifikante Vorkommnisse“ wie den Betrieb ausserhalb der ODD oder das Scheitern, einen MRC zu erreichen, im Rahmen des In-Service Monitoring (ISMR) an die Behörden zu melden.
8. Wie hängen SMS und der Safety Case zusammen?
Das Safety Management System (SMS) und der Safety Case (Sicherheitsnachweis) sind eng miteinander verzahnt und bilden zusammen das Rückgrat für die Zulassung automatisierter Fahrsysteme (ADS). Während das SMS den prozessorientierten Rahmen darstellt, liefert der Safety Case den produktspezifischen Beweis für die Sicherheit eines konkreten Systems.
Anwendung der SMS-Prozesse auf das Produkt.
Der wichtigste Zusammenhang besteht darin, dass der Safety Case die praktische Anwendung des SMS auf das zu bewertende ADS demonstriert. Im Safety Case muss der Hersteller darlegen, wie die im SMS festgelegten Design- und Entwicklungsprozesse genutzt wurden, um das Sicherheitskonzept des konkreten Fahrzeugs umzusetzen.
Nachweis von Fähigkeiten durch Evidenz.
Das SMS stellt sicher, dass ein Hersteller grundsätzlich die Fähigkeit besitzt, Sicherheit über den gesamten Lebenszyklus zu managen. Der Safety Case nutzt die Ergebnisse aus den vom SMS vorgeschriebenen Aktivitäten (wie Risikoanalysen, virtuelle Tests und Realwelt-Prüfungen), um eine strukturierte Argumentationskette (Claims, Arguments, Evidence) aufzubauen:
Das SMS liefert die Methoden (z. B. Validierungsprozesse).
Der Safety Case liefert die Ergebnisse dieser Methoden für ein spezifisches Fahrzeugmodell.
Auditierung vs. Bewertung.
Im Zulassungsprozess werden beide Elemente unterschiedlich, aber ergänzend geprüft:
- Das Audit des SMS stellt fest, ob der Hersteller robuste Prozesse zur Identifizierung und Minderung von Risiken etabliert hat.
- Die Bewertung des Safety Case prüft, ob das Design des ADS tatsächlich sicher ist und ob die durchgeführten Validierungen (die auf den SMS-Prozessen basieren) ausreichen, um unangemessene Risiken auszuschliessen.
Lebenszyklus und kontinuierliche Überwachung.
Der Zusammenhang bleibt auch nach der Markteinführung bestehen. Das SMS enthält Mechanismen wie das In-Service Monitoring and Reporting (ISMR). Die Daten, die durch diese SMS-Prozesse im realen Betrieb gesammelt werden, dienen dazu, die Annahmen im Safety Case kontinuierlich zu bestätigen oder notwendige Änderungen am System (z. B. Software-Updates) zu begründen.
Das SMS ist das Betriebssystem des Herstellers für Sicherheit, während der Safety Case das Dokument ist, das beweist, dass dieses Betriebssystem erfolgreich angewendet wurde, um ein sicheres automatisiertes Fahrzeug zu erschaffen.
9. Was sind die Unterschiede zwischen Level 3, 4 und 5?
Die Level 3, 4 und 5 werden zusammenfassend als Automated Driving Systems (ADS) definiert. Während alle drei Level in der Lage sind, die gesamte dynamische Fahraufgabe (DDT) dauerhaft selbstständig auszuführen, unterscheiden sie sich grundlegend in der Rollenverteilung zwischen Mensch und System sowie dem Umfang ihres Betriebsbereichs.
Die Rolle des Menschen: Fallback-Nutzer vs. Passagier.
Das Regelwerk unterscheidet zwei Haupttypen von ADS-Funktionen:
- Level 3 (ADS-Funktion Typ 1 / ADSF-1): Dieses Level erfordert zwingend einen Fallback-Nutzer. Das System führt die Fahraufgabe zwar vollständig aus, ist aber darauf angewiesen, dass ein Mensch im Falle einer Systemanforderung (z. B. bei Erreichen einer ODD-Grenze oder einem Fehler) die Kontrolle übernimmt. Das System muss daher die Aufmerksamkeit und Bereitschaft dieses Nutzers kontinuierlich überwachen.
- Level 4 und 5 (ADS-Funktion Typ 2 / ADSF-2): Diese Level erfordern keinen Fallback-Nutzer. Das System ist so konzipiert, dass es bei Problemen selbstständig reagiert und das Fahrzeug in einen minimalen Risikozustand (MRC) überführt (z. B. sicheres Anhalten am Strassenrand), ohne dass ein Eingreifen des Menschen notwendig ist. Die Insassen gelten hier rein als Passagiere.
Betriebsbereich (Operational Design Domain - ODD).
Ein weiterer entscheidender Unterschied liegt in den Bedingungen, unter denen das System aktiviert werden kann:
- Level 3 und 4: Diese Systeme sind für den Einsatz innerhalb einer spezifisch definierten ODD konzipiert. Diese Domäne wird durch Faktoren wie Strassentyp (z. B. Autobahn), geografisches Gebiet, Wetterbedingungen oder Tageszeit begrenzt. Das ADS muss erkennen, wenn es diese Grenzen verlässt, und eine entsprechende Fallback-Reaktion einleiten.
- Level 5: Obwohl in den Texten meist die Level 3 bis 5 gemeinsam als ADS behandelt werden, wird Level 5 klassischerweise als ein System verstanden, das keine ODD-Einschränkungen mehr aufweist und unter allen Bedingungen fahren kann, die auch für einen menschlichen Fahrer bewältigbar sind.
Unterschiede nach ADS-Typ.
Merkmal |
Level 3 (Typ 1) |
Level 4 (Typ 2) |
Level 5 (Typ 2) |
|
Ausführung der Fahraufgabe (DDT) |
Vollständig durch ADS |
Vollständig durch ADS |
Vollständig durch ADS |
|
Menschlicher Fallback nötig? |
Ja (Fallback-Nutzer) |
Nein |
Nein |
|
Betriebsbereich (ODD) |
Eingeschränkt |
Eingeschränkt |
Uneingeschränkt |
|
Reaktion bei ODD-Austritt |
Übergabeaufforderung an Mensch |
Automatischer Übergang in MRC |
Nicht anwendbar |
Alle Level müssen jedoch gleichermassen sicherstellen, dass sie keine vorhersehbaren und vermeidbaren Unfälle verursachen und mindestens das Sicherheitsniveau eines kompetenten menschlichen Fahrers erreichen.
10. Was wird von der UN Verordnung in Schweizer Recht übernommen?
Die Übernahme internationaler Regelungen, insbesondere der UN-Regelungen der Wirtschaftskommission für Europa (UNECE), erfolgt in der Schweiz über ein mehrstufiges gesetzliches System, das technische Standards global harmonisiert und gleichzeitig nationale Anwendungsfälle definiert.

Mechanismus der Übernahme in Schweizer Recht.
Die Schweiz integriert internationale Bestimmungen für automatisierte Fahrsysteme (ADS) primär durch folgende rechtliche Instrumente:
- Strassenverkehrsgesetz (SVG): Seit dem 1. März 2025 bildet das SVG mit den Artikeln 25a bis 25h das nationale Fundament für Fahrzeuge mit Automatisierungssystemen der SAE-Stufen 3 bis 5.
- Verordnung über das automatisierte Fahren (VAF): Diese Verordnung konkretisiert die Bestimmungen des SVG und regelt die Zulassung sowie die Verwendung der Systeme in der Praxis.
- Verordnung über die technischen Anforderungen an Strassenfahrzeuge (VTS): Dies ist der zentrale Kanal für die Übernahme internationaler Standards. Über die Anhänge der VTS werden internationale Regelungen der UNECE (WP.29) sowie der Europäischen Union direkt in nationales Recht überführt.
- Typengenehmigung: Die Schweiz verzichtet auf eigene technische Zulassungsvorschriften und erkennt stattdessen ausländische Typengenehmigungen an, die auf den UN- oder EU-Standards basieren.
Was konkret übernommen wird.
Das Schweizer Recht übernimmt eine Reihe spezifischer internationaler Reglemente und technischer Anforderungen:
- UN-Reglement Nr. 155: Anforderungen an das Cybersicherheits-Managementsystem des Herstellers.
- UN-Reglement Nr. 156: Bestimmungen zu Software-Updates und deren Managementsystemen.
- UN-Reglement Nr. 157: Regelungen für automatisierte Spurhaltesysteme (z. B. der Autobahnpilot).
- UN-Reglement Nr. 160: Anforderungen an den Unfalldatenspeicher (Event Data Recorder).
- UN-Reglement Nr. 171: Bestimmungen für Fahrassistenzsysteme.
- Durchführungsverordnung (EU) 2022/1426: Diese wird herangezogen für die Sicherheit von führerlosen Fahrzeugen und das automatisierte Parkieren.
- Fahrmodusspeicher (DSSAD): Gemäss internationalen Vorgaben müssen ADS-Fahrzeuge mit einem Speicher ausgerüstet sein, der Ereignisse wie Notfallmanöver oder technische Störungen aufzeichnet.
Aktueller Stand der erlaubten Anwendungen.
Obwohl das Gesetz die Grundlagen für die Stufen 3 bis 5 schafft, ist der Betrieb in der Schweiz aktuell auf drei spezifische Konstellationen der Stufen 3 und 4 beschränkt, für die die oben genannten internationalen Standards die technische Basis bilden:
- Autobahnpiloten (SAE Level 3), bei denen der Fahrer bereit bleiben muss, die Kontrolle zu übernehmen.
- Automatisiertes Parkieren (SAE Level 4) in dafür zugelassenen und signalisierten Parkhäusern.
- Führerlose Fahrzeuge (SAE Level 4) auf kantonal bewilligten und spezifisch festgelegten Fahrstrecken.
Vollautomatisierte Fahrzeuge der Stufe 5 (jederzeit und überall selbstständig) können derzeit nur im Rahmen von wissenschaftlichen Versuchen durch das ASTRA zugelassen werden.
11. Welche Bedingungen gelten für das automatisierte Parkieren in der Schweiz?
Für das automatisierte Parkieren in der Schweiz gelten seit dem 1. März 2025 spezifische gesetzliche Bestimmungen, die im Strassenverkehrsgesetz (SVG) und in der Verordnung über das automatisierte Fahren (VAF) festgelegt sind. Dieses System wird rechtlich als SAE Level 4 (hochautomatisiert) eingestuft.
Örtliche Voraussetzungen.
Das automatisierte Parkieren ist nicht überall gestattet, sondern an strikte räumliche Bedingungen geknüpft:
- Genehmigte Parkierungsflächen: Der Betrieb ist nur auf vom Fliessverkehr abgetrennten und behördlich genehmigten Parkierungsflächen (z. B. in dafür zugelassenen Parkhäusern) erlaubt.
- Zuständigkeit: Die Festlegung und Genehmigung dieser geeigneten Flächen obliegt den Kantonen oder Gemeinden.
- Signalisierung: Die entsprechenden Parkhäuser und Parkplätze müssen als solche definiert und signalisiert sein.
Anforderungen an den Parkvorgang.
- Abwesenheit des Fahrers: Das System ist so konzipiert, dass es das Fahrzeug ohne anwesende fahrzeugführende Person bewegen und einparken kann.
- Keine Überwachungspflicht: Im Gegensatz zu herkömmlichen Parkassistenzsystemen ist beim automatisierten Parkieren der Stufe 4 keine Überwachung durch eine Person während des Vorgangs erforderlich.
- Übergabestandort: Die Parkierungsfläche muss über einen speziell markierten Übergabestandort verfügen.
- Aktivierung: Die Aktivierung und Deaktivierung des Parksystems darf ausschliesslich an diesem definierten Übergabestandort erfolgen.
Technische und regulatorische Anforderungen.
Damit ein Fahrzeug diese Funktion nutzen darf, müssen folgende Voraussetzungen erfüllt sein:
- Typengenehmigung: Das Automatisierungssystem muss über eine ausländische Typengenehmigung (basierend auf UN- oder EU-Standards wie der Durchführungsverordnung (EU) 2022/1426) verfügen, die von der Schweiz anerkannt wird.
- Fahrmodusspeicher (DSSAD): Das Fahrzeug muss mit einem Speicher ausgerüstet sein, der relevante Ereignisse wie Notfallmanöver oder technische Störungen aufzeichnet.
- Sicherheitsmanagementsysteme: Der Hersteller muss gültige Zertifikate für Managementsysteme in den Bereichen Cybersicherheit und Softwareupdates vorweisen können.
- Instruktion: Der Halter oder Nutzer muss über die bestimmungsgemässe Verwendung aufgeklärt werden und die Gebrauchs- und Bedienungsanleitung beachten.
Wichtiger Hinweis zum aktuellen Stand: Obwohl die rechtlichen Grundlagen existieren, liegt laut dem Bundesamt für Strassen (ASTRA) mit Stand Februar 2026 noch für kein Fahrzeug eine spezifische Typengenehmigung vor, die den Betrieb in der Schweiz in dieser Form aktuell bereits ermöglichen würde.
12. Wie funktioniert die Haftung bei Unfällen mit Automatisierungssystemen?
Die Haftung bei Unfällen mit automatisierten Fahrsystemen (ADS) stellt eine der zentralen Herausforderungen bei der Einführung dieser Technologie dar. In der Schweiz basiert die rechtliche Lösung auf einer Kombination aus bewährten Haftungsprinzipien und neuen datengestützten Nachweismöglichkeiten.
Halterhaftung als primärer Anknüpfungspunkt.
- Weiterbestehen der Halterhaftung: Wenn ein Automatisierungssystem einen Schaden verursacht, kommt in der Schweiz weiterhin die bewährte Halterhaftung zur Anwendung. Das bedeutet, dass der Fahrzeughalter (bzw. seine Versicherung) gegenüber dem Geschädigten primär haftet.
- Rückgriff auf den Hersteller: Falls der Unfall auf einen Fehler des Systems zurückzuführen ist, steht es der Haftpflichtversicherung des Halters frei, Regressansprüche (Rückgriff) gegen den Hersteller des Systems zu prüfen.
- Verschiebung der Risiken (Emerging Risk).
- Vom Fahrer zum Produkt: Experten gehen davon aus, dass sich die Haftungsrisiken mit zunehmender Automatisierung von der Motorfahrzeughaftpflicht (menschliches Versagen) hin zur Betriebs- und Produkthaftpflicht der Hersteller und Zulieferer verschieben werden.
- Direktansprüche: Je höher die Automatisierungsstufe (z. B. Level 4 oder 5), desto wahrscheinlicher werden auch Direktansprüche der Geschädigten gegen die Hersteller. Zudem wird eine Zunahme von Produktrückrufen aufgrund von Softwarefehlern erwartet.
Beweisführung durch Datenspeicherung (DSSAD).
Klärung der Verantwortlichkeit: Um die Haftung im Einzelfall bestimmen zu können, müssen ADS-Fahrzeuge mit einem Datenspeichersystem (DSSAD) ausgerüstet sein.
- Wer war am Steuer? Dieses System zeichnet auf, ob zum Unfallzeitpunkt der Mensch oder das System die Kontrolle über die Fahraufgabe hatte und ob Systemstörungen vorlagen.
- Audtierbare Basis: Diese aufgezeichneten Daten bieten eine revisionssichere Grundlage, um in rechtlichen Verfahren festzustellen, wer für ein Ereignis rechenschaftspflichtig ist.
Pflichten der Beteiligten.
Fahrzeugführende Person: Bei Systemen der Stufe 3 (z. B. Autobahnpilot) darf der Fahrer die Lenkung zwar loslassen, muss aber jederzeit bereit sein, die Kontrolle wieder zu übernehmen, wenn das System ihn dazu auffordert. Unterlässt er dies, kann ihn eine Mitschuld treffen.
- Operatoren: Bei führerlosen Fahrzeugen (Stufe 4) müssen Operatoren in einer Zentrale die Fahrzeuge überwachen und bei Bedarf Anweisungen erteilen, was neue Haftungsfragen für diese Berufsgruppe aufwirft.
- Halterpflichten: Der Halter ist verpflichtet, das Automatisierungssystem gemäss den Herstellervorgaben zu warten und Software-Updates durchzuführen. Eine Weigerung, notwendige Updates zu installieren, könnte die Haftung des Halters verschärfen.
Das Schweizer Recht durch stellt die Beibehaltung der Halterhaftung sicher, dass Unfallopfer rasch entschädigt werden, während die eigentliche Klärung der Schuld zwischen Versicherung und Hersteller im Hintergrund mithilfe von Systemdaten (DSSAD) erfolgt.
13. Wie werden Operatorinnen für führerlose Fahrzeuge in der Schweiz geschult?
Für die Tätigkeit als Operatorin oder Operator von führerlosen Fahrzeugen (SAE Level 4) in der Schweiz gelten seit dem 1. März 2025 spezifische gesetzliche Anforderungen, die eine Spezialschulung voraussetzen.
Hier sind die Details zur Qualifikation und zum Aufgabenbereich basierend auf der Schweizer Gesetzgebung:
Voraussetzungen für die Schulung und Tätigkeit.
- Führerausweis: Personen, die diese Funktion übernehmen möchten, müssen über einen gültigen Führerausweis für die dem Fahrzeug entsprechende Kategorie verfügen, mindestens jedoch der Kategorie B.
- Arbeitsort: Der Arbeitsort der Operatorinnen und Operatoren muss sich nach aktueller Rechtslage zwingend in der Schweiz befinden.
- Spezielle Schulung: Die Verordnung über das automatisierte Fahren (VAF) schreibt explizit vor, dass diese Personen speziell geschult werden müssen. Die vorliegenden Quellen enthalten jedoch keine detaillierte Liste der spezifischen Kursinhalte oder der Dauer dieser Schulung.
Aufgabenbereich der Operatorinnen.
Die Schulung bereitet auf eine völlig neue Funktion im Strassenverkehrsrecht vor, die folgende Kompetenzen umfasst:
- Fernüberwachung: Die Operatorin beaufsichtigt das führerlose Fahrzeug über eine Kommunikationsverbindung aus der Ferne.
- Mehrfachbetreuung: Aufgrund der technischen Unterstützung ist es möglich, mehrere Fahrzeuge gleichzeitig zu überwachen.
- Anweisungen statt Lenken: Die Aufgabe besteht nicht darin, selbst aktive Fahrmanöver (wie Fernsteuern) durchzuführen, sondern dem Automatisierungssystem bei Bedarf entsprechende Anweisungen zu erteilen.
- Intervention: Die Operatorin muss in der Lage sein, in einer Zentrale einzugreifen, wenn das System an seine Grenzen stösst oder Unterstützung bei taktischen Funktionen benötigt.
Die Schulung ist primär darauf ausgerichtet, die Überwachung der Systemstabilität sicherzustellen und die korrekte Interaktion mit dem Automatisierungssystem aus der Distanz zu beherrschen.
14. Kann ein Hersteller bei Softwarefehlern direkt haftbar gemacht werden?
Ein Hersteller kann bei Softwarefehlern haftbar gemacht werden, wobei sich die Art der Haftung je nach Automatisierungsgrad und nationalem Recht unterscheidet. In der Schweiz und im Rahmen der neuen UN-Regelungen erfolgt dies über folgende Mechanismen:
Haftungsverschiebung zur Produkthaftpflicht.
Mit zunehmender Automatisierung verschieben sich die Risiken von der herkömmlichen Motorfahrzeughaftpflicht (menschliches Versagen) hin zur Betriebs- und Produkthaftpflicht der Hersteller und Zulieferer. Experten erwarten, dass die Frequenz und der Umfang von Produktrückrufen aufgrund von Softwarefehlern steigen werden.
Direktansprüche und Regress.
- Primäre Halterhaftung: In der Schweiz bleibt zunächst die bewährte Halterhaftung bestehen, das heisst, der Geschädigte wendet sich primär an die Versicherung des Fahrzeughalters.
- Regress (Rückgriff): Liegt ein Software- oder Systemfehler vor, steht es der Versicherung des Halters frei, Regressansprüche gegen den Hersteller geltend zu machen.
- Direktansprüche: Je höher die Stufe der Automatisierung (insbesondere bei SAE Level 4 und 5), desto wahrscheinlicher werden Direktansprüche der Geschädigten gegen den Hersteller oder dessen Zulieferer.
Beweisführung durch Datenaufzeichnung.
Ein zentrales Element der neuen Weltverordnung ist die Verpflichtung zur Installation eines Datenspeichersystems (DSSAD).
Dieses System zeichnet auf, wer zum Unfallzeitpunkt die Kontrolle hatte (Mensch oder ADS) und ob Systemstörungen vorlagen.
Die aufgezeichneten technischen Beweise dienen als revisionssichere Grundlage für die Verantwortlichkeitsprüfung in rechtlichen Verfahren.
Verantwortung für Cybersicherheit und Updates.
Hersteller sind verpflichtet, Managementsysteme für Cybersicherheit (UN-Reglement Nr. 155) und Software-Updates (UN-Reglement Nr. 156) zu unterhalten. Ein Versagen in diesen Bereichen – etwa wenn eine bekannte Sicherheitslücke nicht durch ein Update geschlossen wurde – kann die Haftung des Herstellers begründen oder verschärfen.
Das neue Regelwerk schafft zwar keine neuen Haftungsgesetze, aber durch den Safety Case und die DSSAD-Datenaufzeichnung die technische Basis liefert, um Hersteller bei Softwarefehlern im Rahmen der bestehenden Produkthaftpflicht effektiv zur Rechenschaft zu ziehen.
15. Wie unterscheidet sich die Halterhaftung bei Level 3 und 4?
In der Schweiz bleibt die primäre Halterhaftung sowohl bei Level 3 als auch bei Level 4 bestehen, was bedeutet, dass der Fahrzeughalter (bzw. seine Haftpflichtversicherung) gegenüber Unfallopfern weiterhin zuerst haftet. Der wesentliche Unterschied liegt jedoch in der Zuweisung der Verantwortlichkeit im Hintergrund und der Verschiebung der Haftungsrisiken zwischen Mensch und Produkt.
Die Rolle der fahrzeugführenden Person:
- Level 3 (Bedingt automatisiert): Der Fahrer darf die Lenkung zwar loslassen, muss aber stets bereit sein, die Kontrolle wieder zu übernehmen, wenn das System ihn dazu auffordert. Wenn ein Unfall passiert, weil der Fahrer dieser Übernahmeaufforderung nicht rechtzeitig oder korrekt nachkommt, bleibt das Haftungsrisiko stark beim Halter/Fahrer verankert.
- Level 4 (Hochautomatisiert): Hier übernimmt das System die Fahraufgabe in einem definierten Bereich dauerhaft selbstständig. Da das System so konzipiert ist, dass es auch im Notfall keinen menschlichen Eingriff mehr erfordert und eigenständig einen sicheren Zustand (MRC) herstellen kann, entfällt die ständige Bereitschaftspflicht des Menschen.
Verschiebung zur Produkthaftpflicht.
- Level 3: Da der Mensch noch als „Rückfallebene“ dient, ist die Abgrenzung zwischen menschlichem Versagen und Systemfehler oft komplex.
- Level 4: Mit zunehmender Automatisierung verschieben sich die Haftungsrisiken weg vom menschlichen Fehlverhalten hin zur Betriebs- und Produkthaftpflicht des Herstellers. Experten gehen davon aus, dass bei Level 4 Direktansprüche von Geschädigten gegen die Hersteller zunehmen werden, da der Mensch während der automatisierten Fahrt keine Überwachungspflicht mehr hat.
Beweisführung durch den Fahrmodusspeicher (DSSAD).
Für beide Level ist ein Datenspeichersystem (DSSAD) vorgeschrieben, doch die Bedeutung der Daten unterscheidet sich in der Anwendung:
- Bei Level 3 dient der Speicher vor allem dazu, zu klären, ob das System eine rechtzeitige Übernahmeaufforderung an den Menschen ausgegeben hat.
- Bei Level 4 steht die Dokumentation der Systemleistung im Vordergrund, um nachzuweisen, dass das Fahrzeug innerhalb seines zulässigen Betriebsbereichs (ODD) einen Fehler begangen hat, was die Basis für den Regress (Rückgriff) der Versicherung gegen den Hersteller bildet.
Regressmöglichkeiten.
In beiden Fällen steht es der Haftpflichtversicherung des Halters frei, bei einem Systemfehler Regress auf den Hersteller zu nehmen. Bei Level 4 ist die Wahrscheinlichkeit eines erfolgreichen Regresses jedoch deutlich höher, da das Fahrzeug das Führen des Fahrzeugs umfassend übernimmt und der Entlastungsbeweis für den Halter einfacher zu führen ist, wenn das System die alleinige Kontrolle hatte.
16. Welche Daten speichert das DSSAD-System bei einem Unfall genau?
Das Data Storage System for Automated Driving (DSSAD) ist darauf ausgelegt, die Sicherheitsleistung von automatisierten Fahrsystemen (ADS) zu überwachen und im Falle eines Unfalls oder sicherheitsrelevanten Ereignisses präzise Daten über die Interaktion zwischen Mensch und System zu liefern. Das System unterscheidet dabei zwischen zeitgestempelten Ereignisdaten (Flags) und Zeitreihendaten (kontinuierliche Leistungsdaten).
Daten, die das System im Falle eines Unfalls oder eines auslösenden Ereignisses (Triggering Event) genau speichert:
Zeitgestempelte Ereignisdaten (Time-stamp data).
Diese Daten markieren den exakten Zeitpunkt und den Status des Systems bei spezifischen Ereignissen. Zu den aufgezeichneten Elementen gehören:
- Systemstatus: Aktivierung und Deaktivierung des ADS (durch das System oder den Nutzer).
- Betriebsgrenzen: Verlassen des definierten Betriebsbereichs (ODD Exit).
- Übergabeprozesse: Start des Rückfalls (Fallback) an den Nutzer oder Übergang in einen minimalen Risikozustand (MRC).
- Interaktionen: Nutzereingaben in die Fahrsteuerung, Stopp-Anforderungen durch Passagiere oder die Verhinderung einer manuellen Übernahme durch das System (z. B. bei Unfähigkeit des Nutzers).
- Sicherheitsmanöver: Beginn und Ende von Notfallmanövern sowie das Erreichen des minimalen Risikozustands (MRC).
- Erkennung: Tatsächlich erkannte Kollisionen, Systemfehler (ADS, Sensoren oder mechanische Systeme) sowie Ferninterventionen.
- Metadaten: Jedes dieser Ereignisse wird mit Datum, Uhrzeit (Sekundenauflösung) und dem exakten Standort (Längen- und Breitengrad) verknüpft.
Zeitreihendaten (Time series data).
Wenn eine Kollision erkannt wird oder der Unfalldatenspeicher (EDR) auslöst, zeichnet das DSSAD zusätzlich detaillierte Zeitreihendaten auf, um das Verhalten des Fahrzeugs und seiner Umgebung unmittelbar vor und nach dem Vorfall zu analysieren. Dazu gehören:
- Objekterkennung: Distanz (längs und quer) zu erkannten Objekten, deren relative Geschwindigkeit sowie die Klassifizierung der Objekte.
- Sensordaten: Falls keine Objektdaten verfügbar sind, werden die Rohdaten der Sensoren (Kameras, Radar, LiDAR) gespeichert.
- Systemanforderungen: Vom ADS angeforderte Beschleunigung, Betriebsbremsung, Parkbremsung und Lenkanforderungen.
- Fahrzeugdynamik: Tatsächliche Längs- und Querbeschleunigung des Fahrzeugs sowie die vom ADS ermittelte Fahrzeuggeschwindigkeit.
Format und Zugriffssicherheit.
Lesbarkeit: Die Daten müssen in einem offenen Standardformat (wie JSON, CSV oder XML) vorliegen und – abgesehen von rohen Sensordaten – in einer für Menschen lesbaren Form (numerische Werte und natürliche Sprache) gespeichert werden.
- Schutz: Das System muss gegen unbefugten Zugriff und Manipulation geschützt sein.
- Verfügbarkeit: Die Daten müssen auch dann abrufbar sein, wenn die Hauptstromversorgung des Fahrzeugs unterbrochen ist oder das Fahrzeug schwer beschädigt wurde.
Das DSSAD dient als eine Art „Blackbox“ für automatisierte Systeme, um revisionssicher zu klären, ob der Mensch oder das System zum Unfallzeitpunkt die Kontrolle hatte und ob das ADS innerhalb seiner Spezifikationen reagiert hat.
17. Welches sind die Hersteller mit der aktuell besten Software?
Es lassen sich derzeit vor allem zwei Unternehmen als Spitzenreiter im Bereich der autonomen Fahrzeugsoftware identifizieren: Tesla und der chinesische Hersteller XPeng. Xiaomi wird zudem als bedeutender Innovator für die nächste Generation der Softwareentwicklung genannt.
Detaillierte Analyse der Hersteller mit der aktuell besten Software:
1. Tesla.
Tesla gilt nach wie vor als der globale Massstab für autonomes Fahren (FSD - Full Self-Driving):
- End-to-End-KI: Teslas Ansatz basiert auf einem neuronalen Netz, das „End-to-End“ arbeitet, also Videodaten direkt in Fahrbefehle umsetzt, ohne auf Millionen von Codezeilen angewiesen zu sein.
- Hardware-Integration: Mit dem AI4-Computer (Hardware 4) verfügt Tesla über eine spezialisierte Plattform, die bereits in Millionen Fahrzeugen verbaut ist und durch Software-Updates kontinuierlich verbessert wird.
- Skalierbarkeit: Da Tesla auf Kameras statt auf teurem LiDAR oder HD-Karten basiert, ist das System theoretisch überall auf der Welt einsetzbar. In Tests zeigt die Version 14 eine beeindruckende Leistung, selbst unter extremen Bedingungen wie verschneiten Bergpässen.
2. Xpeng.
XPeng hat sich in den letzten Jahren zu einem ebenbürtigen Konkurrenten entwickelt, der Tesla in bestimmten Bereichen, insbesondere in China, sogar herausfordert.
- VLA 2.0 Architektur: XPeng hat kürzlich die Vision Language Action (VLA) 2.0 Architektur eingeführt, die visuelle Informationen und Spracheingaben direkt in Fahraktionen übersetzt.
- Turing-Chips: Das System nutzt hochperformante Turing-Chips mit bis zu 2100 TOPS Rechenleistung, was deutlich über der aktuellen Hardware von Tesla liegen soll.
- Komplexitätsbewältigung: In den extrem dichten und oft regnerischen Verkehrssituationen chinesischer Grossstädte wird XPengs Software (NGP - Navigation Guided Pilot) von Testern als extrem „menschlich“ und souverän beschrieben.
- Partnerschaft mit VW: Die Qualität der XPeng-Software wird dadurch unterstrichen, dass der Volkswagen-Konzern diese Technologie lizenziert, um sie in eigenen Fahrzeugen und einer Robotaxi-Flotte in China einzusetzen.
3. Xiaomi
Xiaomi wird in den Quellen als Hersteller hervorgehoben, der die nächste Stufe der KI-Integration vorantreibt.
- Physik- und Geometrie-Modelle: Xiaomi arbeitet an Modellen, die nicht nur Muster abgleichen, sondern ein mathematisches Verständnis für die Gesetze der Physik und Geometrie in den Entscheidungsprozess integrieren.
- Vermeidung von „Halluzinationen“: Durch die Nutzung von Vektoren in einem hochdimensionalen Raum will Xiaomi die Präzision erhöhen und Fehler vermeiden, die bei rein sprachbasierten oder einfachen KI-Modellen auftreten können.
Vergleich und Marktsituation.
Während Tesla in den USA als führend gilt, wird XPeng eine Überlegenheit im komplexen chinesischen Verkehr attestiert. XPeng hat sich das Ziel gesetzt, Teslas FSD-Fähigkeiten bis August einzuholen.
Andere etablierte Hersteller (Legacy Automakers) wie Ford, GM oder Mercedes werden in den Quellen kritisch betrachtet, da sie oft Schwierigkeiten mit echten Over-the-Air-Updates haben und bei der Entwicklung vollautonomer Software-Stacks hinterherhinken. Waymo (Google) wird zwar für seine Sicherheit gelobt, hat jedoch Skalierungsprobleme, da ihr System auf hochauflösenden digitalen Karten (HD Mapping) basiert, die für jede Stadt einzeln erstellt werden müssen.
Übersicht der wichtigsten Softwarefunktionen und technischen Ansätze für Teslas FSD und die Systeme der führenden Wettbewerber (XPeng und Xiaomi):
Vergleich der Softwarefunktionen und Architekturen.
Kategorie |
Tesla FSD (v14 / AI4) |
XPeng VLA 2.0 (NGP) |
Xiaomi (Next-Gen AI) |
|
Kern-Architektur |
End-to-End Neuronales Netz: Videodaten werden direkt in Fahrbefehle übersetzt, ohne modularen Code. |
Vision Language Action (VLA): Kombiniert visuelle Daten, Sprache und Fahraktionen in einem Modell. |
Physik- & Geometriemodelle: Nutzt mathematische Vektorräume zur Simulation von Naturgesetzen. |
|
Hardware / Rechenleistung |
AI4 Computer (Hardware 4) mit ca. 500 TOPS. |
Turing-Chip-Array (3 Chips) mit insgesamt 2.100 TOPS. |
Nutzt Nvidia Orin/Thor Infrastruktur und spezialisierte Adapter. |
|
Sensor-Philosophie |
Vision-only: Verzicht auf LiDAR und Radar; basiert rein auf 8 Kameras. |
Ursprünglich LiDAR, jetzt Fokus auf Kamerabasiert für neue Modelle. |
Integration von Radar-, Kamera- und LiDAR-Daten in ein Geometriemodell. |
|
Fahrmodi / Profile |
Chill, Standard, Hurry, Mad Max: Definiert die Aggressivität und Spurwechselhäufigkeit. |
Human-like AI: Agiert in dichtem Verkehr "menschlich" und behauptet sich aktiv. |
Fokus auf Reasoning (Logik): Vermeidung von reiner Nachahmung (Mimikry). |
|
Vernetzung (V2X) |
Primär visuelle Erkennung; reagiert auf das, was Kameras sehen. |
Tiefe V2X-Integration: Vernetzung mit Ampelsystemen; zeigt Ampel-Countdowns an. |
Nicht explizit als Kernfokus in den VLA-Modellen erwähnt, Fokus liegt auf Weltmodellen. |
|
KI-Assistent |
Grock: Integrierter Assistent für Navigation und Abfragen (z.B. Umleitung bei Sperrungen). |
Sprachkomponente ist direkt im VLA-Modell für Fahrentscheidungen integriert. |
- |
|
Spezialfunktionen |
Summon (Herbeirufen) und Auto Park (inkl. vorwärts/rückwärts einparken). |
Human Coaching: System lernt komplizierte Privatwege durch einmaliges Vormachen des Fahrers. |
Long-Tail-Bewältigung: Versteht seltene Szenarien durch physikalisches Grundverständnis. |
Ergänzende Schlüsselfunktionen für autonomes Fahren (ADS).
Gemäss den neuen UNECE-Regulierungen für 2026 müssen alle Hersteller zudem folgende Software-Infrastrukturen bereitstellen:
- Safety Management System (SMS): Zertifizierte Prozesse zur Überwachung der Sicherheit über den gesamten Lebenszyklus des Fahrzeugs.
- Blackbox (Data Storage System): Verpflichtende Speicherung sicherheitsrelevanter Leistungsdaten des autonomen Systems.
- In-Service-Monitoring: Kontinuierliche Berichterstattung der Systemleistung an Behörden, um aus Fehlern zu lernen und Korrekturmassnahmen einzuleiten.
- Verbot von "Online Learning": Die KI darf nicht während der Fahrt im Auto lernen; alle Updates müssen in kontrollierten Engineering-Umgebungen validiert werden.
18. Wie unterscheidet sich XPengs VLA 2.0 technisch von Teslas FSD?
Basierend auf den Quellen lassen sich die technischen Unterschiede zwischen XPengs VLA 2.0 (Vision Language Action) und Teslas FSD (Full Self-Driving) in den Bereichen Architektur, Rechenleistung und Infrastrukturintegration wie folgt zusammenfassen:
Architektur und Ansatz.
- XPeng VLA 2.0: Diese Architektur integriert – wie der Name sagt – visuelle Daten (Vision), Sprachverarbeitung (Language) und Fahraktionen (Action) in einem Modell. XPeng nutzt ein sogenanntes „Physical World Foundation Model“, das darauf ausgelegt ist, ein verallgemeinerbares Verständnis für physikalische Gesetze und Geometrie zu entwickeln, um „Halleuzinationen“ der KI zu vermeiden. Ein besonderes Merkmal ist die Fähigkeit, durch „menschliches Coaching“ zu lernen: Wenn ein Fahrer dem System eine komplizierte Strecke (z. B. in eine private Garage) einmal zeigt, kann das System diesen Pfad durch Nachahmung lernen.
- Tesla FSD: Tesla setzt auf ein „End-to-End“-neuronales Netz. Dabei werden Videodaten direkt in Fahrbefehle übersetzt, ohne dass Millionen von Zeilen expliziter Programmcode oder modulare Software-Stacks (wie früher für Autobahn vs. Stadt) nötig sind. Tesla verfolgt einen „Vision-only“-Ansatz, der gänzlich auf LiDAR und Radar verzichtet und nur auf Kameradaten basiert. Die KI lernt primär durch das Training mit Milliarden von Meilen an Videodaten aus der weltweiten Flotte, um menschliches Fahrverhalten zu imitieren.
Rechenleistung (Hardware).
Ein signifikanter Unterschied liegt in der verbauten Hardware:
- XPeng: Das System nutzt die neuen Turing-Chips. In den Quellen wird ein Setup aus drei Chips erwähnt, die jeweils 700 TOPS leisten, was eine Gesamtrechenleistung von 2.100 TOPS ergibt. Dies soll die Inferenzgeschwindigkeit im Vergleich zu früheren Generationen um das Zwölffache steigern.
- Tesla: Tesla verwendet den AI4-Computer (Hardware 4). Die Rechenleistung dieses Chips wird in den Quellen mit etwa 500 TOPS angegeben, womit XPeng rein hardwareseitig über eine deutlich höhere Kapazität verfügt.
V2X und Infrastruktur-Anbindung.
- XPeng: In China ist das System über V2X (Vehicle-to-Everything) mit dem städtischen Stromnetz bzw. der Verkehrsinfrastruktur verbunden. Dadurch „weiss“ das Auto bereits Kilometer im Voraus, wann eine Ampel auf Grün schaltet, selbst wenn diese noch nicht im Sichtbereich der Kameras liegt.
- Tesla: Tesla verlässt sich primär auf die visuelle Erkennung der Umgebung durch seine acht Kameras. Es gibt keine vergleichbare tiefe Integration in städtische Ampelsysteme; das Auto reagiert auf das, was es sieht.
Integration von Sprach-KI.
XPeng: Die Sprachkomponente ist bei VLA 2.0 fest in die Entscheidungsmatrix der Fahrsoftware integriert.
- Tesla: Tesla integriert Grock (einen KI-Assistenten), der zwar Sprachbefehle versteht und Routen anpassen kann (z. B. „Suche eine Route ohne Maut“ oder „Fahre zu einem anderen Ausgang, weil dieser gesperrt ist“), aber die eigentliche Fahrsteuerung erfolgt durch das separate neuronale Netz von FSD.
- Tesla setzt auf die Effizienz eines rein visuellen End-to-End-Systems, während XPeng durch massive Rechenleistung, die Einbeziehung von Sprachmodellen und die Vernetzung mit der städtischen Infrastruktur (V2X) versucht, die Präzision und „Menschlichkeit“ des Systems zu erhöhen.
19. Was macht Xiaomis Ansatz mit Physik-Modellen so besonders?
Xiaomis Ansatz für die nächste Generation des autonomen Fahrens unterscheidet sich grundlegend von herkömmlichen Systemen, da er den Fokus von einer rein sprachbasierten Logik auf eine tiefgreifende mathematische und physikalische Modellierung verschiebt.
Abkehr von der "Linguistischen Kette".
Herkömmliche "Vision Language Action" (VLA) Modelle funktionieren oft wie eine sprachliche Gedankenkette, bei der die KI intern Wörter wie „Bremsen“ generiert. Laut den Quellen ist menschliche Sprache jedoch zu langsam und unpräzise, um komplexe physikalische Daten wie eine exakte Kurvenneigung von 14,72° schnell genug zu verarbeiten. Xiaomi nutzt stattdessen einen 1024-dimensionalen mathematischen Vektorraum, in dem geometrische und dynamische Informationen in Echtzeit berechnet werden.
Integration von Welt- und Geometriemodellen.
Xiaomi setzt auf zwei zusätzliche Basismodelle als „Lehrer“, um dem System echtes Verständnis beizubringen:
- World Model (WM): Dieses Modell (basierend auf Nvidia Cosmos) vermittelt die Gesetze der Physik. Es definiert, was physikalisch überhaupt möglich ist – zum Beispiel, dass ein Auto nicht plötzlich abheben kann und wie sich Masse bei Beschleunigung verhält.
- Geometric Model (VGT): Dieses Modell sorgt für ein präzises Verständnis von Raum, Tiefe und der Geometrie von Hindernissen.
Logisches Denken statt blosser Nachahmung.
Während viele Systeme lediglich menschliches Fahrverhalten kopieren (Mimikry), strebt Xiaomi einen echten „Reasoning“-Prozess (logisches Schliessen) an. Durch die Verknüpfung der Physik mit der Geometrie lernt das System übertragbare Prinzipien der Natur anstatt nur spezifische Szenen auswendig zu lernen.
Lösung für "Halluzinationen" und Randfälle.
- Vermeidung von Fehlern: Da das Modell physikalisch „geerdet“ ist, werden semantische Halluzinationen vermieden, die bei rein textbasierten KI-Modellen auftreten können.
- Beherrschung seltener Szenarien: Besonders bei sogenannten „Long-Tail“-Ereignissen (extrem seltene Verkehrssituationen) ist dieser Ansatz im Vorteil. Da die KI die zugrunde liegende Physik versteht, kann sie auch in Situationen korrekt reagieren, die sie im Training noch nie exakt so gesehen hat.
Xiaomis System stellteine kontinuierliche numerische Simulation der Welt dar, die in jedem Moment berechnet, wie sich die Umgebung unter Berücksichtigung der Naturgesetze entwickeln wird.
20. Vergleich der Rechenleistung von Tesla und XPeng.
Basierend auf den Quellen lässt sich die Rechenleistung von Tesla und XPeng wie folgt vergleichen, wobei XPeng derzeit bei der reinen Hardware-Leistung (TOPS) führt:
Tesla: AI4 / Hardware 4.
Tesla setzt aktuell auf den AI4-Computer (auch bekannt als Hardware 4), der seit 2024 in allen Neufahrzeugen verbaut wird.
- Rechenleistung: Das System verfügt über eine Leistung von etwa 500 TOPS (Tera Operations Per Second).
- Chip-Konfiguration: Tesla nutzt in der Regel einen dedizierten Chip für die Verarbeitung der FSD-Software.
- Ansatz: Tesla fokussiert sich auf ein effizientes End-to-End-neuronales Netz, das Videodaten direkt in Fahrbefehle übersetzt. Die Hardware ist darauf optimiert, mit der weltweit gesammelten Datenmenge aus Millionen Fahrzeugen zu arbeiten.
XPeng: Turing-Chip-Array.
XPeng hat mit der Einführung seiner neuen VLA 2.0 Architektur (Vision Language Action) massiv in Rechenleistung investiert.
- Rechenleistung: Ein einzelner Turing-Chip leistet bereits 700 TOPS. XPeng verbaut jedoch ein Array aus drei Turing-Chips, was zu einer Gesamtrechenleistung von 2.100 bis 2.250 TOPS führt.
- Vergleich zu Tesla: Damit bietet XPeng laut den Quellen die fast dreifache Rechenleistung eines aktuellen Tesla-Systems.
- Effizienzsprung: Die neue Hardware ermöglicht eine Inferenzgeschwindigkeit (die Geschwindigkeit, mit der die KI Entscheidungen trifft), die 12-mal schneller ist als bei der vorherigen XPeng-Generation.
Vergleich Rechenleistung.
Merkmal |
Tesla (AI4) |
XPeng (Turing-Setup) |
|
Gesamtleistung |
ca. 500 TOPS |
2.100 - 2.250 TOPS |
|
Chip-Anzahl |
1 Hauptchip |
3 Chips im Verbund |
|
Architektur-Fokus |
End-to-End-Vision |
Vision-Language-Action (VLA) |
|
Besonderheit |
Globale Skalierbarkeit durch riesigen Datenschatz |
Integration von V2X (Vernetzung mit Ampelsystemen) |
XPeng hat Tesla bei der brutalen Rechenleistung pro Fahrzeug überholt, um die extrem komplexen Verkehrssituationen in chinesischen Megastädten und die zusätzliche Sprachverarbeitung in Echtzeit zu bewältigen. XPeng behauptet sogar, mit diesem System bei der Leistungsfähigkeit (z.B. selteneren manuellen Eingriffen) den engsten Wettbewerbern um das Fünffache voraus zu sein. Tesla hingegen setzt auf ein hochoptimiertes System, das mit weniger Rechenleistung bereits eine Sicherheit von über 99 % im Alltag erreicht.
21. Welche Rolle spielt Nvidia Cosmos bei der Entwicklung von Xiaomis Weltmodell?
Nvidia Cosmos spielt eine zentrale Rolle als World Model (WM) in Xiaomis neuer KI-Architektur für autonomes Fahren. Es fungiert dabei als einer von zwei „Lehrern“, um dem System ein tiefes Verständnis der physischen Realität zu vermitteln.
Spezifische Funktionen von Nvidia Cosmos:
- Physische Erdung (Physical Grounding): Nvidia Cosmos dient als Plattform für „Physical AI“ und stellt die sogenannten „Physical Priors“ bereit. Das bedeutet, es vermittelt der KI die grundlegenden Gesetze der Natur und definiert, was in der realen Welt physikalisch überhaupt möglich ist.
- Definition physikalischer Grenzen: Innerhalb des mathematischen Modells legt Cosmos fest, wie sich Masse, Geschwindigkeit, Beschleunigung und Verzögerung unter Berücksichtigung der Physik verhalten. So „weiss“ das System beispielsweise, dass ein Auto nicht plötzlich abheben oder unmögliche Flugkurven vollziehen kann.
- Vermeidung von Halluzinationen: Durch die Destillation dieses physikalischen Wissens in den latenten Raum der Xiaomi-Software werden semantische Halluzinationen und Fehler in der Entscheidungsfindung vermieden, die bei herkömmlichen textbasierten Modellen auftreten können.
- Prädiktion der Weltentwicklung: Die Gewichte des neuronalen Netzes von Xiaomi werden mithilfe von Cosmos so optimiert, dass sie die Wahrscheinlichkeitsverteilung verstehen, wie sich die Welt in den nächsten Sekundenbruchteilen (z. B. einer halben Sekunde) physikalisch korrekt weiterentwickeln wird.
- Beherrschung seltener Szenarien (Long-Tail): Da das System dank Cosmos übertragbare physikalische Prinzipien lernt, anstatt nur spezifische Szenen auswendig zu lernen, kann es auch in extrem seltenen Verkehrssituationen, die nicht Teil des Trainingsmaterials waren, sicher reagieren.
Nvidia Cosmos ist die „physikalische Vernunft“ hinter Xiaomis Fahrsoftware, die sicherstellt, dass alle geplanten Trajektorien des Fahrzeugs den Gesetzen der Natur entsprechen.
22. Wie unterscheidet sich die FSD-Fahrweise (Tesla) von der eines menschlichen Fahrers?
Die Fahrweise von Teslas Full Self-Driving (FSD) (insbesondere in der Version 14) wird in den Quellen oft als erstaunlich menschlich, geschmeidig und natürlich beschrieben, weist jedoch spezifische Unterschiede zum typischen Verhalten eines menschlichen Fahrers auf.
Hier sind die zentralen Unterschiede und Merkmale der FSD-Fahrweise im Vergleich zu einem Menschen:
Geschmeidigkeit und Komfort ("Der perfekte Chauffeur").
- Natürliche Bewegungen: Tester beschreiben das Lenk-, Brems- und Beschleunigungsverhalten als so sanft, dass man oft nicht mehr unterscheiden kann, ob eine Maschine oder ein Mensch fährt.
- Vorausschauendes Bremsen: Im Gegensatz zu früheren Versionen, die oft ruckartig reagierten, blickt die aktuelle Software weiter voraus und verlangsamt das Fahrzeug bei stockendem Verkehr sehr natürlich.
- Kurvenfahrt: Während Menschen in Kurven oft korrigieren oder abrupt bremsen, berechnet FSD Kurven für maximale Laufruhe.
Defensive Fahrweise und Regelkonformität.
- Hohe Defensivität: Das System agiert grundsätzlich sehr vorsichtig und defensiv, was von einigen Testern (insbesondere jüngeren) als „zu gemütlich“ empfunden werden kann.
- Höfliches Verhalten: FSD verhält sich oft rücksichtsvoller als Menschen, indem es beispielsweise Gassen für andere Verkehrsteilnehmer freihält oder Fussgänger sehr frühzeitig und sicher queren lässt.
- Strikte Regeleinhaltung: Das Auto bricht kaum Regeln und neigt – im Gegensatz zu vielen menschlichen Fahrern – nicht zu überhöhter Geschwindigkeit, ausser es ist explizit in aggressiveren Profilen wie „Mad Max“ eingestellt.
Übermenschliche Wahrnehmung vs. menschliche Intuition.
- Früherkennung: Das System erkennt Fussgänger oder Hindernisse oft 200 bis 250 Meter im Voraus oder bei schlechter Sicht (Nebel), bevor ein Mensch sie überhaupt wahrnimmt.
- Prädiktion: FSD kann die Bewegungsbahn von Personen bis zu 30 Sekunden im Voraus berechnen und sein Verhalten entsprechend anpassen.
- Mangelnde Intuition in Grenzbereichen: Trotz der hohen Präzision fehlen dem System manchmal menschliche „Intuition“ oder Erfahrungswerte. Beispielsweise fährt FSD auf Schnee oder Eis teils schneller, als ein Mensch es tun würde, da es die Rutschgefahr möglicherweise unterschätzt.
Typische "unmenschliche" Fehler und Schwächen.
- Phantombremsungen: Ein nach wie vor existierendes Problem ist das plötzliche, harte Bremsen ohne ersichtlichen Grund, oft in Baustellenbereichen, was für menschliche Fahrer hinter dem Tesla sehr überraschend und unangenehm sein kann.
- Dichtes Auffahren (Tailgating): In einigen Modi folgt das System dem Vordermann in einem Abstand von nur etwa einer Sekunde, was nach gängigen Sicherheitsmassstäben für Menschen als zu nah und unsicher gilt.
- Zeitpunkt von Geschwindigkeitsänderungen: FSD reagiert auf Tempolimits oft erst direkt am Schild, während Menschen meist schon vorher ausrollen lassen oder verzögern.
- Navigations- und Parkfehler: In komplexen Situationen (z. B. Schulzonen oder Einbahnstrassen nach Parkvorgängen) kann das System falsche Abzweigungen wählen oder Parkplätze ansteuern, die ein Mensch als ungeeignet erkennen würde.
FSD fährt in Standard-Situationen oft sicherer und aufmerksamer als ein Mensch, wirkt aber in seltenen Spezialfällen (Edge Cases) noch unvorhersehbar oder macht „dämliche“ Fehler, die einem erfahrenen Fahrer nicht unterlaufen würden.
23. Wie gut kommt das amerikanische System mit den Verkehrsregeln in Deutschland zurecht?
Basierend auf den Testberichten kommt das amerikanische System von Tesla (FSD - Full Self-Driving) überraschend gut mit den deutschen Verkehrsregeln und den speziellen Bedingungen hiesiger Innenstädte zurecht. Obwohl das System ursprünglich in den USA entwickelt wurde, zeigen aktuelle Testfahrten in Städten wie München, Düsseldorf und Giessen, dass es bereits eine hohe Reife für den europäischen Markt besitzt.
Wie das System spezifische deutsche Anforderungen meistert:
Anpassung an lokale Gegebenheiten.
Das in Deutschland getestete System ist keine reine Kopie der US-Software. Tesla nutzt spezifisch in Deutschland gesammelte Daten, um das System auf lokale Schilder, Regeln und Infrastrukturbesonderheiten zu trainieren:
- Ampelpositionen: Während Ampeln in den USA oft hinter der Kreuzung hängen, stehen sie in Deutschland davor. Das System erkennt dies und hält den korrekten Abstand zur Haltelinie ein, um die Sicht auf die Ampel zu wahren.
- Rechts-vor-Links: An Kreuzungen ohne Vorfahrtsschilder tastet sich das System vorsichtig heran, um auf möglichen Querverkehr von rechts reagieren zu können, was als sehr „menschliches“ Fahrverhalten beschrieben wird.
Bewältigung komplexer Szenarien.
In den Testberichten werden mehrere schwierige Situationen hervorgehoben, die das System souverän gelöst hat:
- Ungeschütztes Linksabbiegen: In Giessen meisterte das Fahrzeug ein komplexes Linksabbiege-Manöver über eine vielbefahrene Kreuzung gegen einen entgegenkommenden LKW ohne Markierungslinien.
- Enge Strassen und Hindernisse: In Düsseldorf navigierte das System durch extrem enge Strassen, wich korrekt auf den Gehweg aus, um Platz für einen entgegenkommenden LKW zu machen, und wartete geduldig auf Fahrradfahrer.
- Interaktion mit Fussgängern: Das System erkennt Fussgänger an Zebrastreifen und Ampeln sehr frühzeitig – oft früher als der menschliche Fahrer – und hält weich an.
Verhalten auf der Autobahn.
Auf deutschen Autobahnen (z. B. der A94 bei München) wird das Fahrverhalten als sehr geschmeidig und komfortabel wie bei einem „perfekten Chauffeur“ beschrieben:
- Spurwechsel: Diese erfolgen automatisch und wesentlich sanfter als bei früheren Autopilot-Versionen.
- Geschwindigkeit: Das System bleibt auch bei höheren Geschwindigkeiten (bis ca. 140 km/h) aktiv.
Schwachstellen und Einschränkungen.
Trotz der positiven Eindrücke gibt es Bereiche, in denen das System noch nicht perfekt arbeitet:
- Reaktionszeit bei Tempolimits: Das System passt die Geschwindigkeit oft erst nach dem Passieren des Schildes an, was in Deutschland streng genommen nicht korrekt ist, da das Limit ab dem Schild gilt.
- Zögerlichkeit: In manchen Situationen agiert das System sehr defensiv, was von ungeduldigen menschlichen Fahrern als zu langsam empfunden werden könnte.
- Rechtlicher Status: In Deutschland ist das System aktuell nur als Level-2-Assistent im Rahmen von Testgenehmigungen im Einsatz. Der Fahrer trägt weiterhin die volle Verantwortung und muss das System permanent überwachen.
Tesla hat durch die Nutzung von KI und neuronalen Netzen ein System geschaffen, das „die echte Welt versteht“ und nicht auf starre HD-Karten angewiesen ist. Dies ermöglicht es dem Fahrzeug, flexibel auf bauliche Änderungen oder unvorhergesehene Hindernisse in deutschen Städten zu reagieren.
24. Welche Vorteile bietet V2X (XPeng) für die Stauvermeidung in Städten?
Die V2X-Technologie (Vehicle-to-Everything), die insbesondere von Herstellern wie XPeng in chinesischen Grossstädten bereits intensiv genutzt wird, bietet signifikante Vorteile für die Vermeidung von Staus und die Effizienz des Stadtverkehrs:
- Vorausplanung von „Grünen Wellen“: Durch die Anbindung an das städtische Strom- und Verkehrsnetz „weiss“ das Fahrzeug bereits Kilometer im Voraus, wann eine Ampel auf Grün schaltet, selbst wenn diese noch nicht im Sichtbereich der Kameras liegt. Das System kann die Geschwindigkeit so anpassen, dass das Auto genau zum Umschaltzeitpunkt ankommt, was unnötiges Abbremsen und Wiederanfahren verhindert.
- Optimiertes Rerouting basierend auf Signalzeiten: Im Gegensatz zu herkömmlichen Navigationssystemen, die Routen primär nach der aktuellen Verkehrsdichte berechnen, kann ein V2X-System den Fahrer (oder das autonome System) gezielt über Routen führen, die aktuell vorteilhaftere Ampelphasen haben. Es findet also nicht nur den kürzesten Weg, sondern den mit dem geringsten Widerstand durch rote Ampeln.
- Präzise Countdown-Informationen: Das System zeigt im Display exakt an, wie viele Sekunden eine Ampel noch Rot oder Grün bleibt (z. B. „noch 41 Sekunden Rot“). Dies reduziert die Unsicherheit im Verkehrsfluss und ermöglicht ein flüssigeres Mitschwimmen im dichten Stadtverkehr.
- Frühzeitige Erkennung von Engpässen: Da das Fahrzeug mit der gesamten Infrastruktur vernetzt ist, kann es Informationen über Staus oder Unfälle schneller und präziser verarbeiten als Systeme, die nur auf Sensordaten oder verzögerte Community-Meldungen angewiesen sind.
- Vermeidung von Stop-and-Go: Da das Fahrzeug die Ampelphasen in seine Fahrstrategie einbezieht, wird die Anzahl der Bremsvorgänge massiv reduziert. In einem Test wurde beispielsweise dokumentiert, dass durch die intelligente Assistenz über 450 Bremsmanöver auf einer Strecke von nur 39 Kilometern vermieden werden konnten.
V2X sorgt dafür, dass autonom agierende Fahrzeuge nicht nur auf ihre unmittelbare Umgebung reagieren, sondern Teil eines intelligenten Gesamtnetzwerks werden, was den Verkehrsfluss in komplexen urbanen Umgebungen deutlich harmonisiert.
25. Regulatorischen Hürden in der aktuelle Gesetzgebung für autonomes Fahren in der Europäischen Union (EU).
Status Quo: Level 2 und die Überwachungsflicht.
Aktuell ist das autonome Fahren in Deutschland und der EU primär auf Level 2 (Assistenzsysteme) beschränkt. Das bedeutet, dass die komplette Verantwortung jederzeit beim Fahrer liegt, der das System permanent überwachen muss.
- Interaktionszwang: Nach klassischen Regeln ist es derzeit nicht möglich, Systeme zuzulassen, die ohne Fahrerinteraktion (z. B. Bestätigung des Spurwechsels durch Blinken oder Blick in den Spiegel) agieren.
- Ausnahmegenehmigungen: Für aktuelle Testfahrten mit Systemen wie Teslas FSD in deutschen Innenstädten sind spezielle Genehmigungen erforderlich.
Zentrale Hürde: Nachvollziehbarkeit und KI-Lernen.
Ein kritischer Punkt in der EU-Regulierung ist das Verbot von „Online In-vehicle learning AI“.
- Kein lokales Lernen: Ein Fahrzeug darf sich im laufenden Betrieb nicht selbstständig neue Fahrweisen anlernen.
- Nachvollziehbarkeit: Die Behörden fordern, dass jede Entscheidung der KI nachvollziehbar sein muss. Software-Updates müssen daher in einer kontrollierten Engineering-Umgebung (Simulator/Testgelände) geprüft und zertifiziert werden, bevor sie auf die Flotte ausgerollt werden.
- Verbot von öffentlichen Beta-Tests: Die EU lehnt das Ausrollen von Beta-Versionen an Endkunden zu Testzwecken auf öffentlichen Strassen strikt ab.
Der Wendepunkt: Die neue UNECE-Verordnung (Juni 2026).
Die UNECE (Wirtschaftskommission der Vereinten Nationen für Europa) hat einen Entwurf für eine globale Verordnung für automatisierte Fahrsysteme (ADS) erarbeitet, der voraussichtlich im Juni 2026 verabschiedet wird:
- Zulassung von Level 4: Diese Verordnung soll den Einsatz von Fahrzeugen ohne menschliche Aufsicht ermöglichen.
- Harmonisierung: Ziel ist es, den aktuellen „Flickenteppich“ nationaler Regelungen durch ein einheitliches Regelwerk zu ersetzen, sodass ein Fahrzeug ohne Probleme Grenzen innerhalb Europas (z. B. von Dänemark über Deutschland nach Frankreich) autonom überqueren kann.
- Technologieneutralität: Die Verordnung schreibt keine spezifischen Sensoren wie LiDAR vor, sondern fokussiert sich auf ergebnisorientierte Sicherheitsnachweise.
Strategische Wege zur Markteinführung.
Für Hersteller wie Tesla oder XPeng gibt es zwei primäre Wege, ihre Systeme in Europa zuzulassen:
- Der „Niederländische Weg“ (RDW): Die niederländische Behörde RDW gilt als Vorreiter bei der Zertifizierung innovativer Technologien. Eine Zulassung in den Niederlanden (erwartet für Februar/März 2026) könnten andere EU-Länder wie Deutschland oder Österreich durch gegenseitiges Vertrauen übernehmen.
- EU-weite Zulassung: Die RDW kann im Auftrag eines Herstellers eine Zulassung bei der EU-Kommission beantragen. Wenn diese zustimmt, wäre das System auf einen Schlag in der gesamten EU erlaubt.
Anforderungen für Hersteller.
Um eine Zertifizierung nach dem neuen UNECE-Standard zu erhalten, müssen Hersteller folgende Kriterien erfüllen:
- Sicherheitsmanagementsystem (SMS): Verpflichtende Prozesse über den gesamten Lebenszyklus des Fahrzeugs.
- Blackbox-Pflicht: Ein Datenspeichersystem muss sicherheitsrelevante Leistungsdaten aufzeichnen.
- Nachweis der Sicherheit: Das System muss belegen, dass es mindestens so sicher oder besser als ein kompetenter, vorsichtiger menschlicher Fahrer agiert.
Dieser regulatorische Rahmen wird als entscheidend angesehen, um das öffentliche Vertrauen zu stärken und die Skalierung autonomer Flotten in Europa zu ermöglichen.
26. Wie hängen Tesla und der EU-Regulierungsplan für 2026 zusammen?
Der Zusammenhang zwischen Tesla und dem EU-Regulierungsplan für 2026 basiert primär auf den neuen globalen Vorschriften der UNECE (Wirtschaftskommission der Vereinten Nationen für Europa), die voraussichtlich im Juni 2026 verabschiedet werden. Diese Regulierung soll den Flickenteppich nationaler Gesetze durch ein einheitliches Regelwerk für autonome Fahrsysteme (ADS) ersetzen und damit den Weg für Level-4-Systeme ohne menschliche Aufsicht ebnen.
Technologieneutralität als Vorteil für Tesla.
Die neue UNECE-Regelung ist ein bedeutender Durchbruch für Tesla, da sie technologieneutral verfasst wurde. Anstatt bestimmte Sensoren wie LiDAR oder Radar vorzuschreiben, konzentriert sich der Entwurf auf den Sicherheitsnachweis durch Daten. Da Tesla konsequent auf einen reinen Kamera-Ansatz (Vision-only) setzt, kann das Unternehmen seine Systeme nun durch die Milliarden bereits gefahrener Meilen legitimieren, ohne Hardware-Nachrüstungen vornehmen zu müssen.
Tesla als Vorreiter in der Umsetzung.
Die Quellen heben hervor, dass Tesla derzeit der einzige Automobilhersteller ist, der technisch und organisatorisch bereit für diese Massenproduktion autonomer Fahrzeuge nach dem neuen Standard ist. Während traditionelle Hersteller oft noch mit Over-the-Air-Updates (OTA) kämpfen, erfüllt Tesla bereits die Anforderungen an das Datenmanagement und die kontinuierliche Leistungsüberwachung, die im UNECE-Entwurf gefordert werden.
Der Zulassungsweg über die Niederlande (RDW).
Ein kritischer Faktor für den Zeitplan 2026 ist die niederländische Behörde RDW, die oft als Tor für den europäischen Markt fungiert. Es wird erwartet, dass Tesla seine Sicherheitsdaten im Frühjahr 2026 dort zur Zertifizierung einreicht. Sobald die RDW das System für den Level-2-Betrieb (oder höher) zulässt, können andere EU-Länder wie Deutschland diesen Standard übernehmen, was durch den globalen UNECE-Rahmen ab Juni 2026 massiv beschleunigt wird.
Skalierung und Marktpotenzial.
Wenn der Plan im Jahr 2026 in Kraft tritt, betrifft dies über 60 Länder, die diesem Regelwerk folgen. Für Tesla bedeutet das eine sofortige Skalierbarkeit:
In Europa gibt es bereits etwa 1,3 Millionen aktive Teslas, deren Flotte durch ein Software-Abo sofort auf das neue System zugreifen könnte.
Dies fällt zeitlich mit der erwarteten Volumenproduktion des Cybercab (Robotaxi) zusammen, das speziell für diese neue Ära des unüberwachten Fahrens entwickelt wurde.
Der EU-Regulierungsplan 2026 baut genau die Hürden ab, die Teslas FSD-System in Europa bisher blockiert haben, indem er den Fokus von spezifischer Hardware hin zu nachweisbarer Sicherheit verschiebt.
27. Welchen Sicherheitsnachweis fordert die UNECE für autonome Systeme ab 2026?
Die neue globale Regelung der UNECE (Wirtschaftskommission der Vereinten Nationen für Europa), die voraussichtlich im Juni 2026 verabschiedet wird, markiert einen Paradigmenwechsel: Weg von der Vorschrift bestimmter Technologien (wie LiDAR oder Radar) hin zu einem ergebnisorientierten Sicherheitsnachweis.

Hier sind die zentralen Anforderungen an den Sicherheitsnachweis für autonome Systeme (ADS) ab 2026:
Der „Safety Case“ (Sicherheitsnachweis-Ansatz).
Hersteller müssen einen sogenannten „Safety Case“ vorlegen. Dies ist eine strukturierte Argumentation, die durch Belege untermauert wird, um nachzuweisen, dass das System:
- Die ergebnisorientierten Anforderungen erfüllt.
- Frei von unzumutbaren Risiken ist.
- Mindestens genauso sicher oder besser agiert als ein kompetenter und vorsichtiger menschlicher Fahrer.
Sicherheitsmanagementsystem (SMS).
Ein zertifiziertes SMS ist verpflichtend. Es umfasst die Sicherheitssteuerung über den gesamten Lebenszyklus des Fahrzeugs. Die Einhaltung dieser Governance-Prozesse und Kompetenzen wird durch regelmässige Audits und Zertifizierungen überwacht.
Validierung und Testmethodik.
Die Überprüfung der Systeme erfolgt über eine harmonisierte Validierungsmethode, die auf robusten Forschungs- und Entwicklungsprozessen basiert:
- Glaubwürdigkeit von Tests: Hersteller müssen die Verlässlichkeit ihrer Testumgebungen nachweisen, wobei auch virtuelle Tool-Chains (Simulationen) explizit anerkannt werden, da nicht alles im realen Strassenverkehr getestet werden kann.
- Verbot von „Online Learning“: Um die Vorhersehbarkeit zu gewährleisten, darf die KI innerhalb des Fahrzeugs keine neuen Fahrweisen während des Betriebs eigenständig erlernen (kein Online In-vehicle learning AI). Software-Updates müssen in einer kontrollierten Umgebung geprüft werden, bevor sie ausgerollt werden.
Überwachung und Datenspeicherung.
- In-Service-Monitoring: Es wird ein kontinuierlicher Feedback-Mechanismus gefordert. Die Leistung des Systems im laufenden Betrieb muss überwacht und den Behörden gemeldet werden, um korrigierende Massnahmen zu ermöglichen.
- Blackbox-Pflicht: Jedes Fahrzeug muss über ein Datenspeichersystem für automatisiertes Fahren verfügen, das sicherheitsrelevante Leistungsdaten aufzeichnet und speichert.
Die UNECE fordert keinen Nachweis über die verwendete Hardware, sondern einen umfassenden, datenbasierten Beleg dafür, dass das System unter allen definierten Bedingungen sicher manövriert und die menschliche Fahrleistung erreicht oder übertrifft.
Weitere Artikel zu E-Autos:
E-Autos, Trends, Entwicklung.
Technologien, Batterien, Märkte, Robotik, KI, FSD (autonomes Fahren), Ladezeit, Reichweite. Ausblicke in die dynamische Entwicklung des Elektroautomarktes: Technologien und globale Skalierung.
Beste E-Autos 2026.
Vergleich 76 Modelle nach Reichweiten, Batterien, Effizienz, schnellstes Laden, technische Funktionen, bester Preis. Demokratisierung der Elektromobilität, Entwicklungen und Modelloffensiven der Elektroautos 2026.






Übersichtsseiten mit Inhaltsverzeichnissen.






Disclaimer / Abgrenzung
Stromzeit.ch übernimmt keine Garantie und Haftung für die Richtigkeit und Vollständigkeit der in diesem Bericht enthaltenen Texte, Massangaben und Aussagen.
Quellenverzeichnis (März 2026).
UN
United Nations Global Technical Regulation on Automated Driving Systems (ADS)
https://unece.org/sites/default/files/2026-01/ECE-TRANS-WP.29-GRVA-2026-02e.pdf
Schweizer Recht
https://www.vischer.com/know-how/blog/autonomes-fahren-die-regulierung-nach-schweizer-recht/
https://www.astra.admin.ch/astra/de/home/themen/intelligente-mobilitaet/automatisiertes-fahren.html
Erfahrungsberichte.
Beeindruckende Tesla Full-self-drive-Testfahrt in München | FSD autonomes Fahren die Zukunft
https://www.youtube.com/watch?v=Kem-LjDkMzM
Tesla FSD Probefahrt in Düsseldorf - Erstes Mal in Deutschland (Volle Länge)
https://www.youtube.com/watch?v=JH3CzSKB0Ww&t=20s
Ohne LiDAR auf Level 4: XPeng kopiert Tesla - und macht es besser??
https://www.youtube.com/watch?v=BTjMkTuW4Aw
Tesla FSD in Deutschland: Wie gut fährt das Auto wirklich allein? | CHIP ePower Spezial
https://www.youtube.com/watch?v=ngfVFaLPucs
I Tried Tesla's UPDATED Self Driving 4.5 Hardware - $8k FSD Challenge
https://www.youtube.com/watch?v=Qb0ZQ76-1MU
The First Tesla FSD Ride Made Him Nervous. This One Felt Different.
https://www.youtube.com/watch?v=qSOGIrtN8mQ
organ Stanley Shocked! Xpeng Catches Tesla Full Self Driving
https://www.youtube.com/watch?v=uzyTyguVxDU
Tesla Full Self Driving in Deutschland: Mit FSD fährt das Auto komplett von selbst!
https://www.youtube.com/watch?v=ulLaQudtDV0
Is Autonomous Driving Safer Than A Human? | Tesla FSD V14.2.2.5
https://www.youtube.com/watch?v=FmDbEj90YS4
XPeng wird immer besser: erster *objektiver* Vergleich von Tesla FSD und chinesischem
Konkurrenten
https://www.youtube.com/watch?v=J2txToRNk-g
IT IS HAPPENING!: UNECE Publishes WORLD-FIRST Global Self-Driving Regulation - June 2026 Approval!
https://www.youtube.com/watch?v=oHPPGZ_H58k
I Was NERVOUS About Tesla's FSD in the Mountains...Now I LOVE It! | Hands Free 2000 Ep. 5
https://www.youtube.com/watch?v=2ucoTvmj35k
Xiaomi EV’s Next Self-Driving AI Explained
https://www.youtube.com/watch?v=n36ohNNWm_s
UN verabschiedet Entwurf für eine globale Verordnung zum autonomen Fahren
https://www.youtube.com/watch?v=nMqgTorQx78
*Illustrationen © NotebookLM.